负载选型最容易踩的坑是:只看“工件有多重就够了”(但机器人真正要扛的是末端那一刻的等效载荷)。结果你在纸面上“能做”,现场却出现节拍跑不稳、抓取掉落或反复保护停机。
更可靠的做法是:把末端工装也算进去(EOAT:夹具/抓手/吸盘/转接件),再从“最坏那一轮动作”估算你的最坏负载。然后用“额定负载”(更接近长期稳定工作能力)做主判据;峰值负载(更像短时上限)只用来理解短时边界,不建议当作日常工作负载。
先分清:额定负载 vs 峰值负载
额定负载:决定你日常循环能不能稳、能不能按节拍跑(更接近长期能力)
峰值负载:通常对应更苛刻的短时条件(可理解为短时上限)
小例子:抓苹果会差在哪里
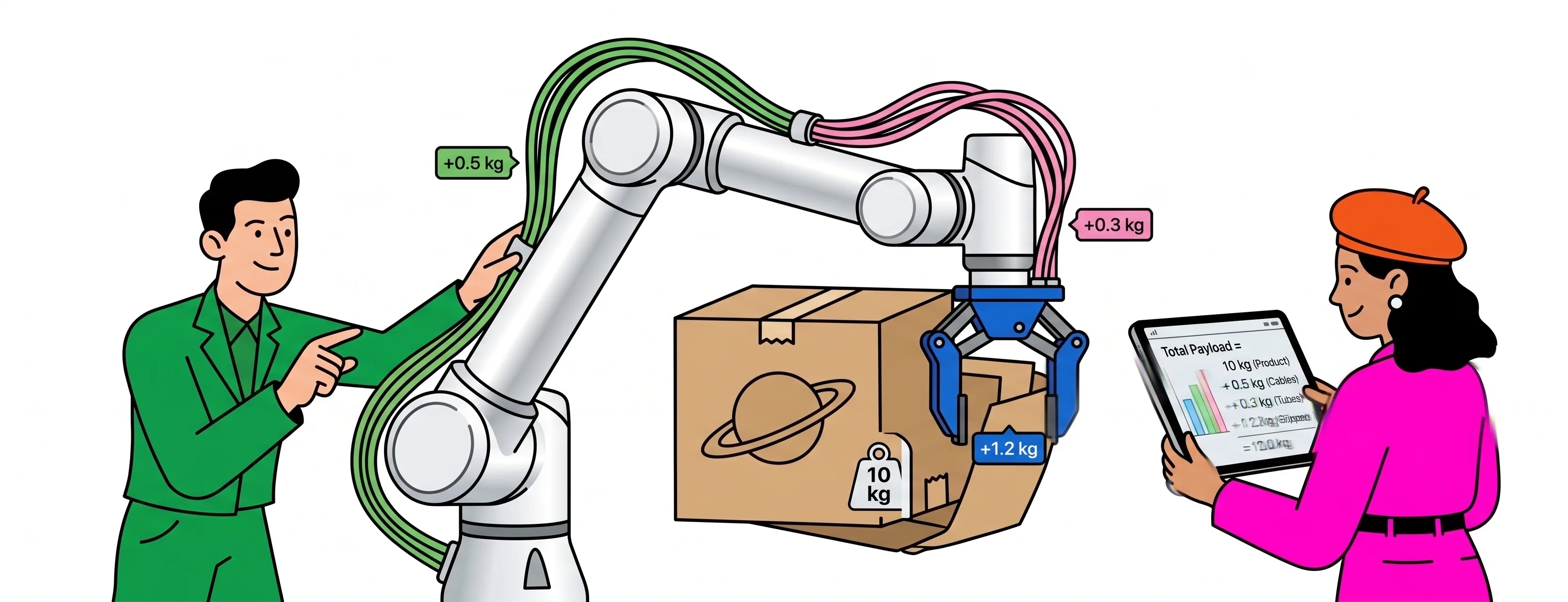
假设你抓的是一颗 120g 的苹果(工件重量),但你的夹具/吸盘/转接件加起来还有 180g(EOAT)。合在一起,TCP 处的重量已经不是 120g。再考虑启停和加减速带来的动态效应(动态载荷=等效载荷),你的“最坏负载”会比静态总重再高一截。此时就别只看“峰值够不够”,要看机器人“额定有没有余量”(余量越足,越不容易在节拍里掉链子)。
常见误区(让你觉得够用,现场却不稳)
只按工件重量选(EOAT/治具漏算)
把“能伸到最远点”当作可行(关键姿态下的受力余量没核对)
用峰值当日常工作负载(短时上限不等于长期能力)
忽略启停与加速度(动态载荷没并入)
没把偶发恢复动作算进来(卡料/重试属于最坏工况的一部分)
用一张清单算出你的“最坏负载”
列出 TCP 处所有东西:工件 + EOAT(夹具/抓手/吸盘/转接件)
写清运动边界:最快速度/加速度、最远伸出位置、关键姿态(最吃受力的角度)
把静态重量转成最坏那一轮(把启停、摆动、偶发重试纳入同一套估算)
对照规格时用额定为主(额定负载覆盖你的最坏负载),峰值做短时理解
预留工程余量(让你的最坏负载落在能力范围内,并为性能衰减/波动留空间;需要时先试跑验证)
把选择变成能对齐团队的结论
当你得到“最坏负载清单”,你就能用同一种口径去对比不同档位:负载余量够不够(rated headroom)、臂展/关键姿态是否覆盖(工作半径与姿态校核)。你拿到的是一份可对齐采购、工程与现场节拍的依据,而不是感觉
下一步
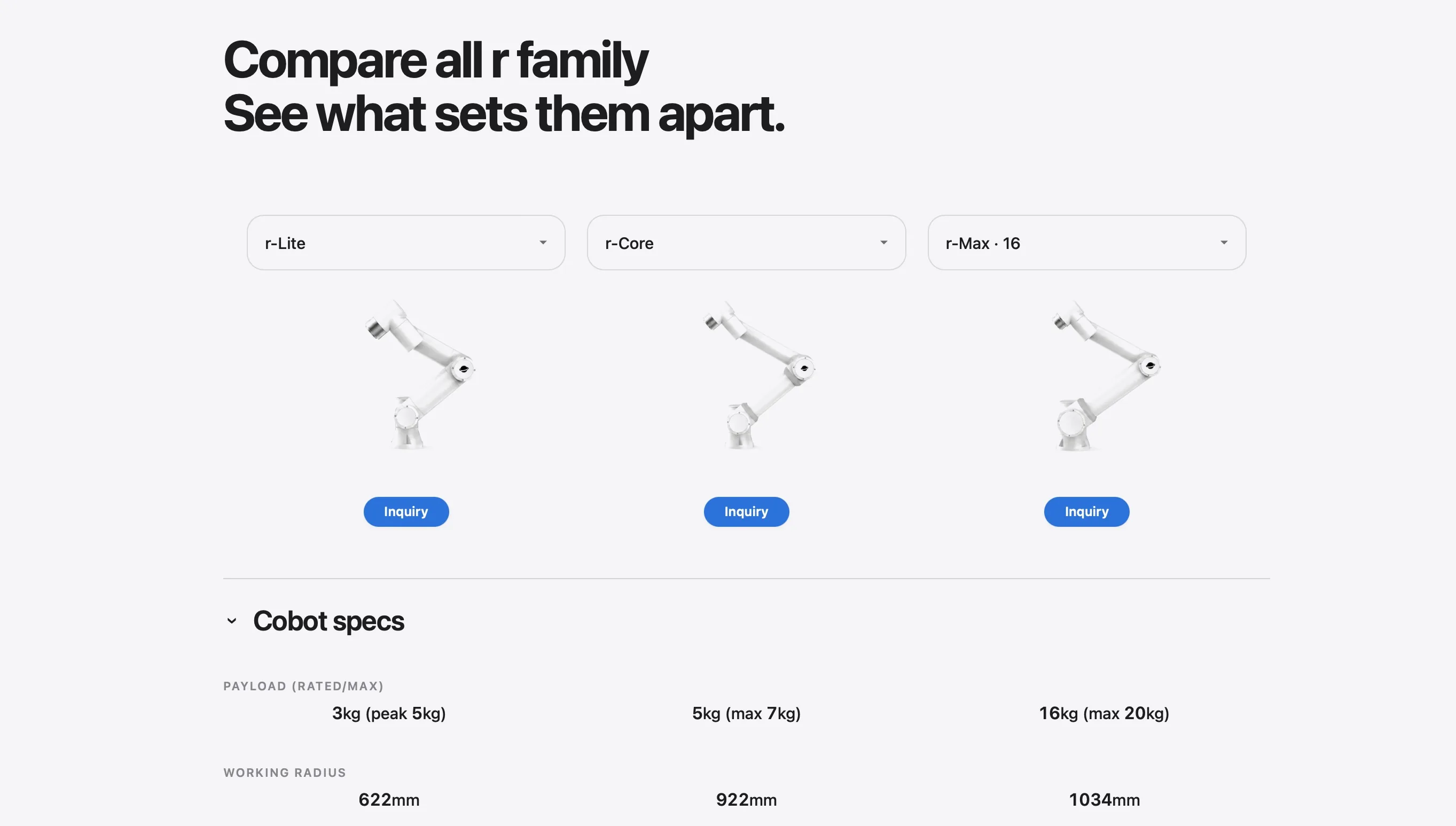
打开横向对比选型,先按负载余量锁定档位:https://roooll.com/zh/selector/comparison
把你的 EOAT 组成和最坏工况写进对比输入,用同一张链接对齐内部口径:https://roooll.com/zh/selector/comparison
需要有人主推“优先级最高的那一档”?从选型顾问开始:https://roooll.com/zh/selector/advisor
把你的工装与运动轮廓发我们,我们按现场约束一起核对:https://roooll.com/zh/contact