臂展选型里最常见的一句是:“规格表上写得够,应该没问题。”但规格表上的工作半径(臂展),是厂商在标准安装与规定条件下测出来的参考值——它回答的是“这台臂标称能伸多远”,不是你这个工位在真实取放姿态下“一定够得到”。
你现场真正要核对的是:目标点在 TCP(末端中心点),不是法兰;夹具、吸盘、转接件会再占一段(EOAT);取料/放料时腕部往往不能拉成一条直线(关键姿态);外侧线缆包、罩壳和相邻设备也会在满伸之前就吃掉余量。所以直线距离碰得上 catalog 数字,仍然可能在调试阶段才发现够不到或轨迹绕不开。
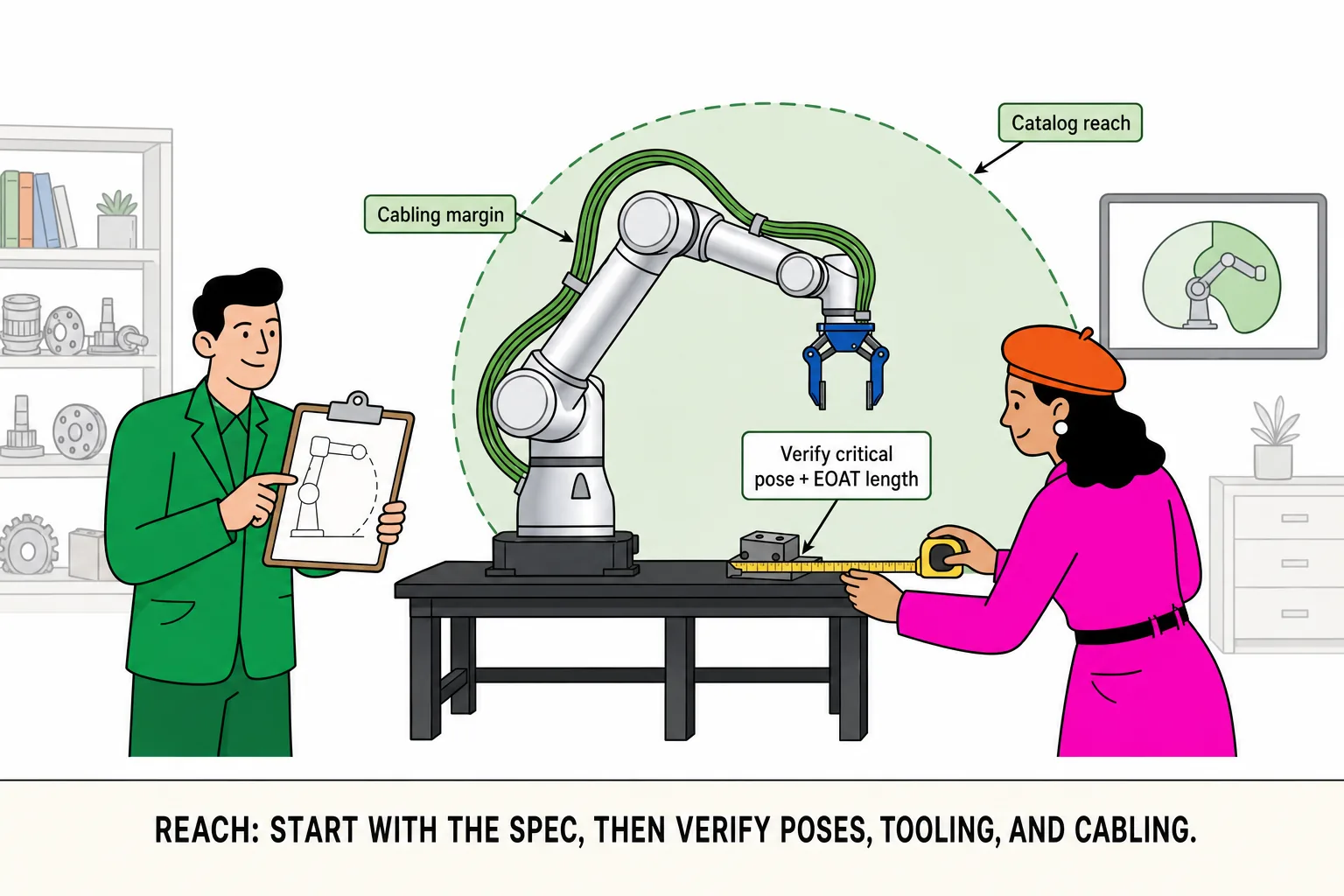
更可靠的做法分两步:先用规格臂展把型号缩到 2–3 个档位,再对“最坏那一拍”的取放姿态做校核——能不能稳定到达、有没有干涉、退刀路径是否可行。不要把连杆长度手算相加当成 reach;那是示意图里的简化,不是厂商规格口径,也不能代替布局验证。
先分清:规格臂展 vs 现场能不能用
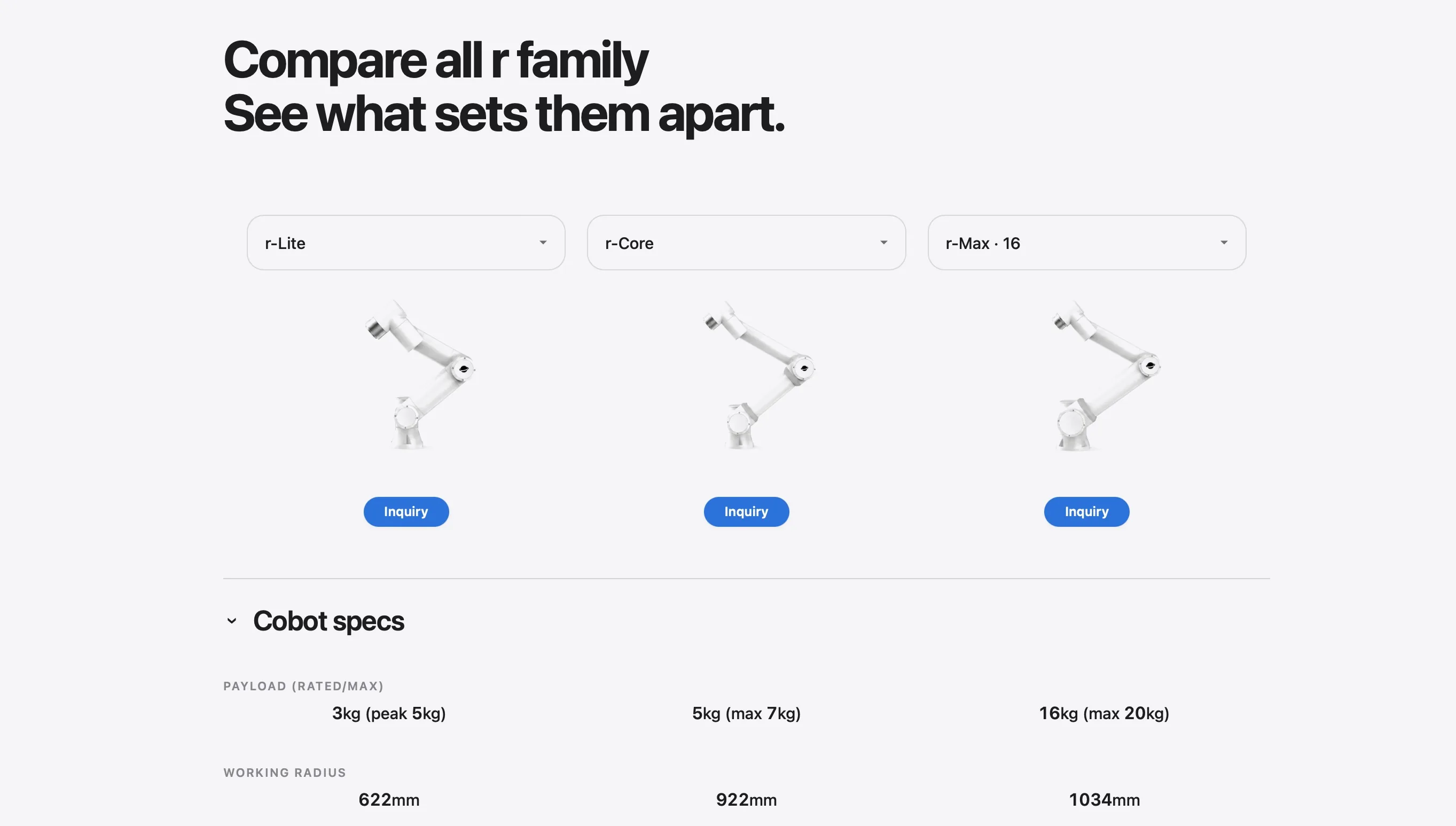
规格臂展(catalog reach):目录里的第一遍筛选——例如 622 mm、922 mm、1402 mm,用来快速排除明显不够的型号
现场可用范围:把工装长度、进出角度、障碍和线缆余量都算进去之后,这台单元在你的工位上真能重复执行的区域
小例子:传送带最远工位为什么会在纸面上“刚好够”
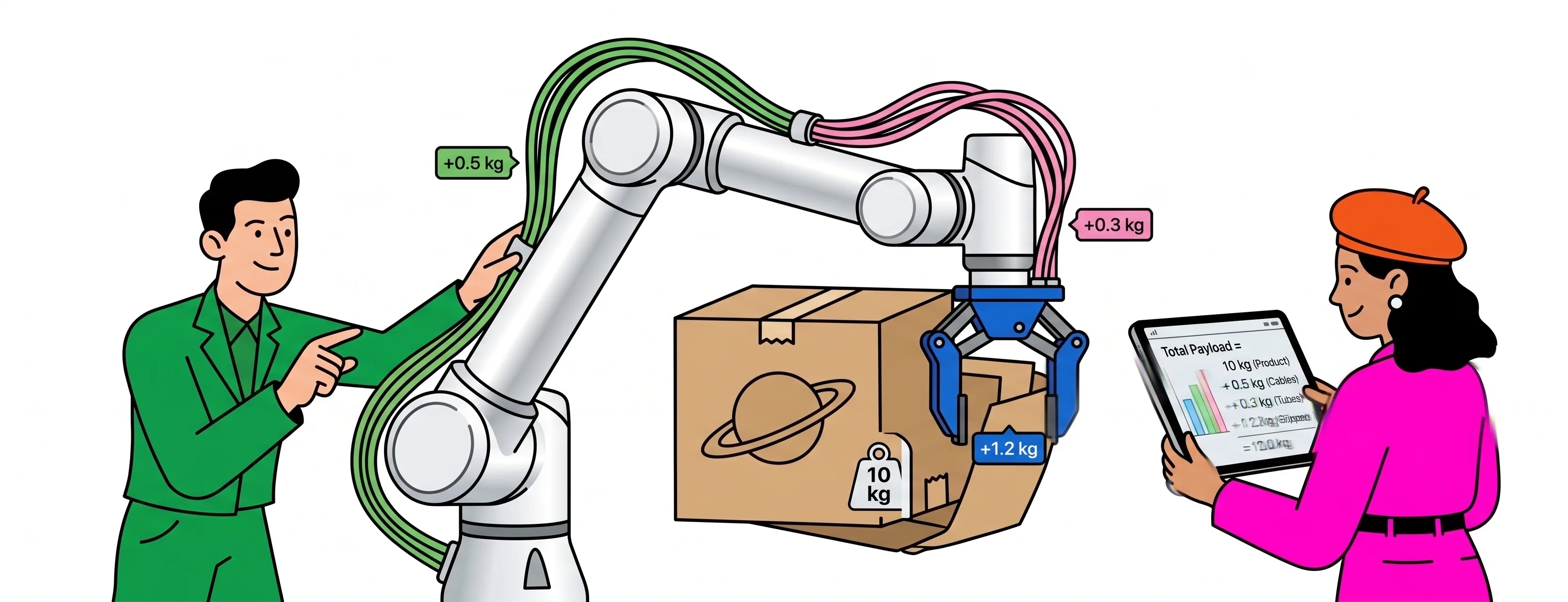
工位中心离基座水平约 820 mm,对比表里某款标称 922 mm 臂展,看起来留了 100 mm 余量。但夹具和吸盘让 TCP 比法兰再伸出约 110 mm;这一工位需要从侧面斜向取料,腕部不能保持完全伸直;满伸时外侧线缆包还要留弯曲余量。三项叠在一起,最远工位那一拍的有效覆盖会明显短于 922 mm。此时该问的不是“标称数字大不大”,而是“关键姿态下还有没有余量”。
常见误区
只量基座到工位中心的直线距离,没把 EOAT 和 TCP 算进去
默认“臂能伸到最远点就能干活”,没核对真实取放角度和退刀路径
布局里没把罩壳、立柱、相邻设备算进障碍——臂展够,轨迹走不通
怎么校核(不必搞复杂公式)
从规格表记下 catalog reach,先筛型号
在工位图或 CAD 里标出 TCP 目标点、EOAT 轮廓和最吃空间的取放姿态(关键姿态);量的是 TCP 到基座参考点的距离,不是只量到法兰
走一遍完整进出路径(进刀、退刀、避障),确认满伸时先碰到的是不是你的线缆或罩壳
关键姿态落在包络内侧再定稿;不确定就试跑,别靠“应该够”
和负载选型一起对齐
臂展和负载是同一套工位的两条边:臂展覆盖关键姿态,负载覆盖最坏工况。把两项结论放进同一张对比表,采购、集成和现场才能用一份链接说话,而不是各拿各的参数各说各话。若你已经在看负载怎么算,可以对照阅读:https://roooll.com/zh/news/choose-right-payload
下一步
用横向对比选型把臂展、负载和关节轴放在一张表里:https://roooll.com/zh/selector/comparison
需要按应用场景先缩档位?从选型顾问开始:https://roooll.com/zh/selector/advisor
有工位布局或 CAD,发我们按现场约束一起核对:https://roooll.com/zh/contact