职业院校、本科机器人实验室和竞赛队,学期里要反复演示 pick-and-place、轨迹跟踪、简单装配——真正耗时间的是:每组学生示教出来的路径不一样、演示前夜才发现撞机或碰线、比赛规则要求可重复而现场却每次不同。教师和技术员要的不是「买一台最贵的臂」,而是可存档、可恢复、可验收的演示配方,同时保留学生动手示教和调试的学习价值。
协作实验演示单元在实验室里实际在做什么
典型教学循环:
讲解与边界 — 教师定义演示目标、安全区和禁止姿态
示教/加载 — 学生示教路径或加载教师审核的基准程序
运行与测量 — 重复运行,记录节拍、精度或任务完成度
迭代 — 改参数、改路径、对比结果;评估的是过程,不是无人值守产量
自动化的是可重复的演示动作与评估指标——不是「替学生完成课程」。
用协作臂做可重复实验演示,现场通常能拿到什么
演示结果可复现。 开幕日、上级参观、竞赛彩排——同一配方跑十遍,结果接近,减少「今天臂 mood 不好」的尴尬。
教学时间花在理解,不是重复排错。 基准程序让学生从「能跑」迭代到「理解为什么这样跑」。
安全边界清晰。 限速、限 workspace、急停演练——可以写进实验指导书。
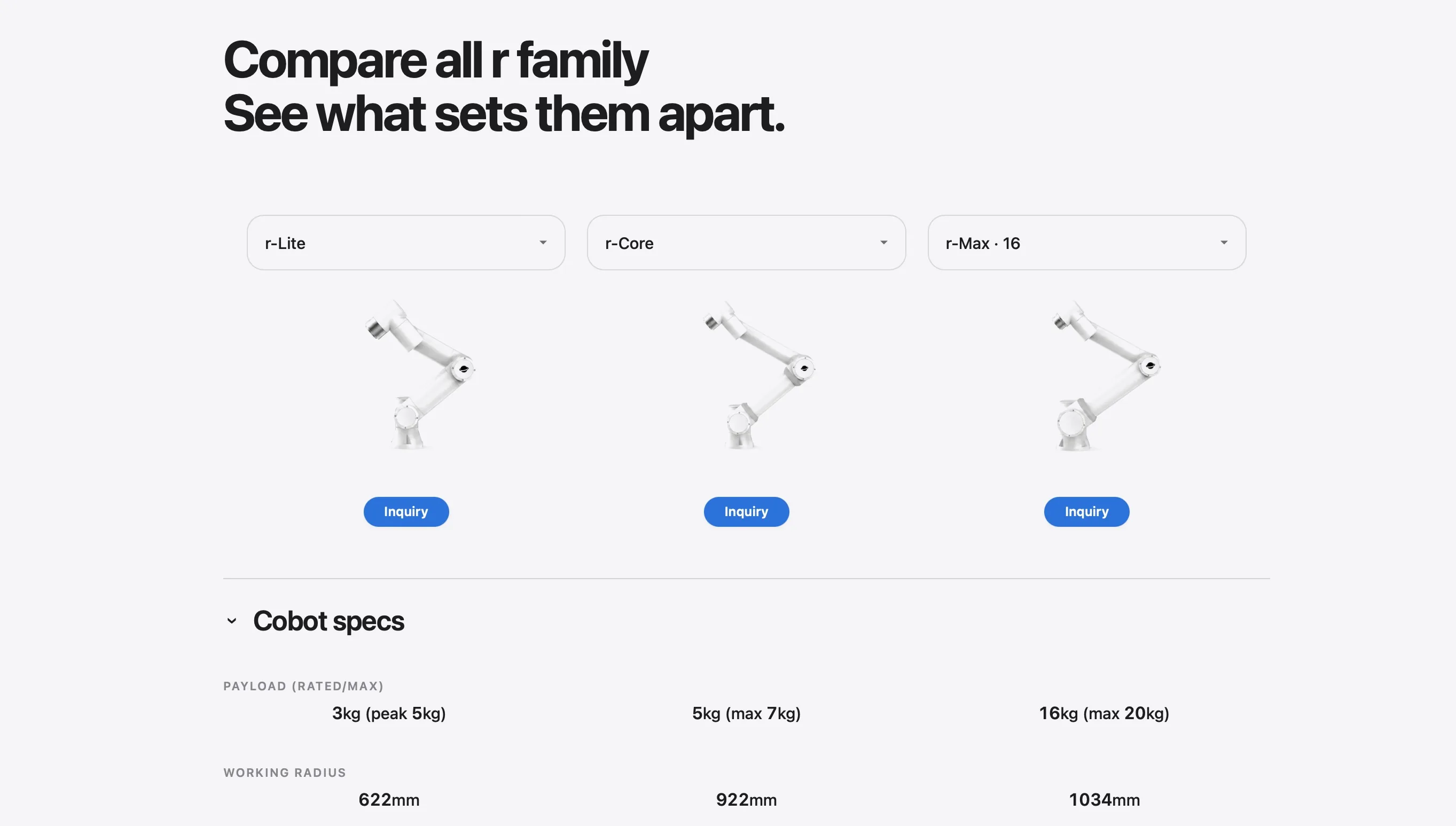
占地适合实验台。 r-Lite(约 3 kg 额定) 适合入门台位和多台布点;需要更大工作包络或稍重末端治具时,对比 r-Core(约 5 kg 额定)。
竞赛与课程可共用设备。 换程序而不是换整台硬件——适合预算有限的实验室。
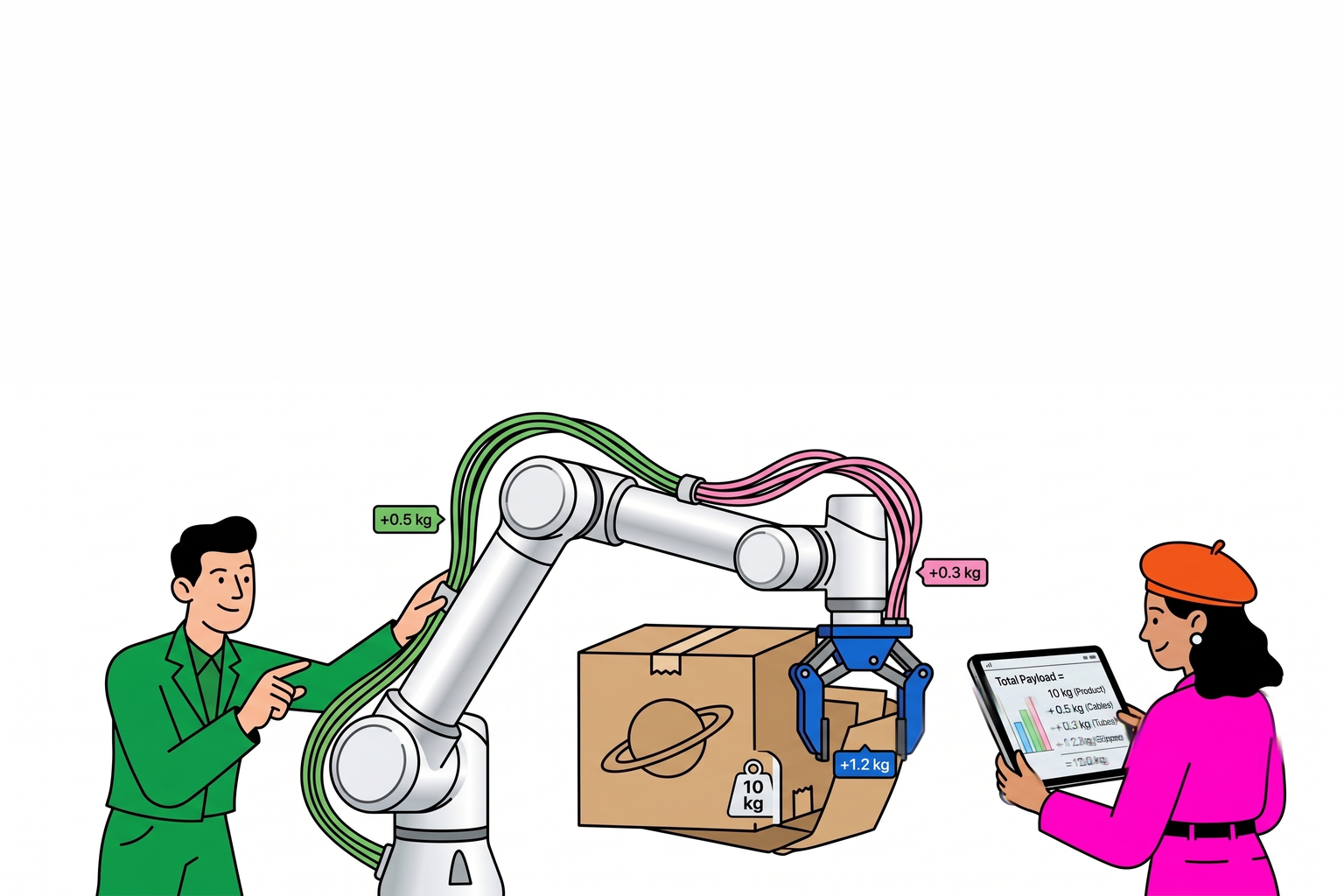
负载与臂展:教学演示几乎总是轻载
标准夹爪、教学治具、轻量工件 — TCP 多在 0.3–2 kg
入门/多台布点:r-Lite — 集成基座省空间、线缆简单
更大台位、跨距或稍重治具:r-Core — 仍不需要 r-Max/r-Ultra,除非课程明确做重载搬运模块
并排对比:横向对比选型
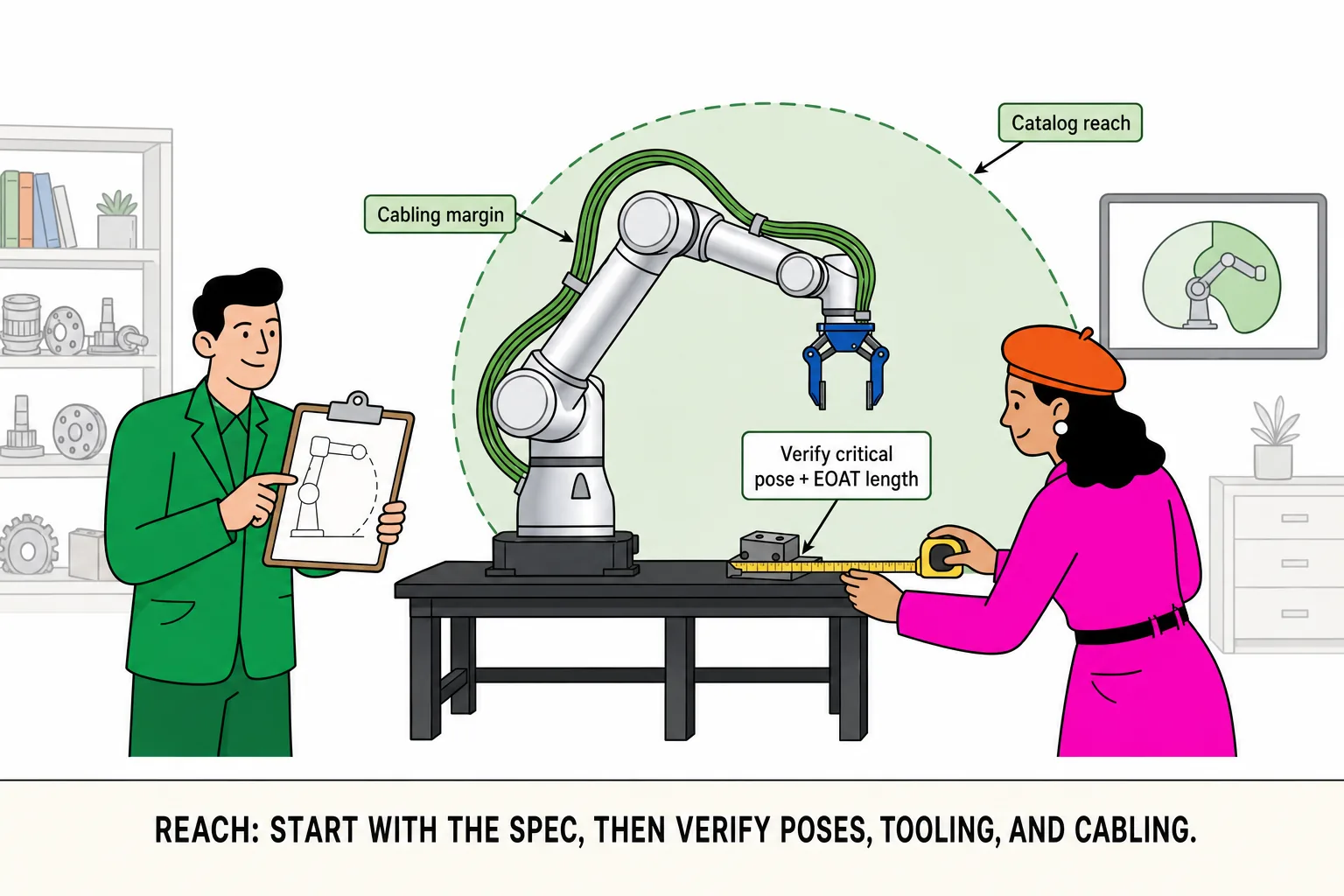
臂展计算:臂展指南
两个现场推演(示意)
推演 A — 4 台入门台,轻夹爪 0.6 kg: r-Lite 布点。评审:急停培训、程序版本管理、谁有 admin 权限。
推演 B — 竞赛台大工位,治具 2.2 kg、跨距大: r-Core 进对比——不是上大档重载臂。
现场最常翻车的三件事
没有教师基准程序,全靠学生临场示教。 应保留示教环节,但要有可恢复的 gold copy。
演示日前改 IO/治具,没有回归测试。 竞赛周应冻结配置清单。
安全培训走过场。 协作臂教学必须含 workspace、急停和碰撞恢复演练。
什么时候不该硬上「演示自动化」
课程目标是纯理论、无动手环节
实验室无法保证基本安全培训与监护
期望替代全部学生示教体验
工件与任务每天完全随机、无法建立评估基线
集成商评审清单(教育演示)
| 核对项 | 说明 |
|---|---|
| TCP 负载与台位跨距 | r-Lite vs r-Core |
| 教师基准程序与版本 | 谁维护 gold copy |
| 安全区与急停 | 写入实验指导书 |
| 学生权限与日志 | 误操作能否恢复 |
| 竞赛/课程共用换型 | 改程序步骤 |
| 多台布点与线缆 | 实验室管理 |