简要结论
调试翻车多数来自采购前的“同类缺口”:只看规格、漏算 EOAT/动态余量、团队没对齐一条布局/对比链接
用表里的 5 个误区快速自检:负载口径、关键 TCP 姿态、EOAT 路径、日常按额定而非峰值、同一张对比链接
再用一个“最坏件 + 真换型/真节拍”的现场片段复测:任何一项不过线就回到对应指南补证据
把结果写成 PO 前能签字的验收口径:最坏 TCP 负载、关键姿态的 EOAT 包络、以及谁能说“通过/不过”
调试第三天:负载核对过了,对比表也锁定了档位,合同已签。首轮量产仍反复保护停机——规格表上「够得到」的托盘工位,在真实取放姿态下从未清障。多数意外不是品牌问题,而是采购前同一类缺口叠在一起。
本文是报价前的快审:五个几乎每单都会出现的误区、现场会怎样、以及该读哪篇深指南。
五个会改变项目的误区
| 误区 | 现场会怎样 | 下一步 |
|---|---|---|
| 只看工件单重 — 漏算 EOAT 与动态 | 掉料、保护停机、节拍漂移 | 工件 + EOAT + 额定余量 → 负载指南 |
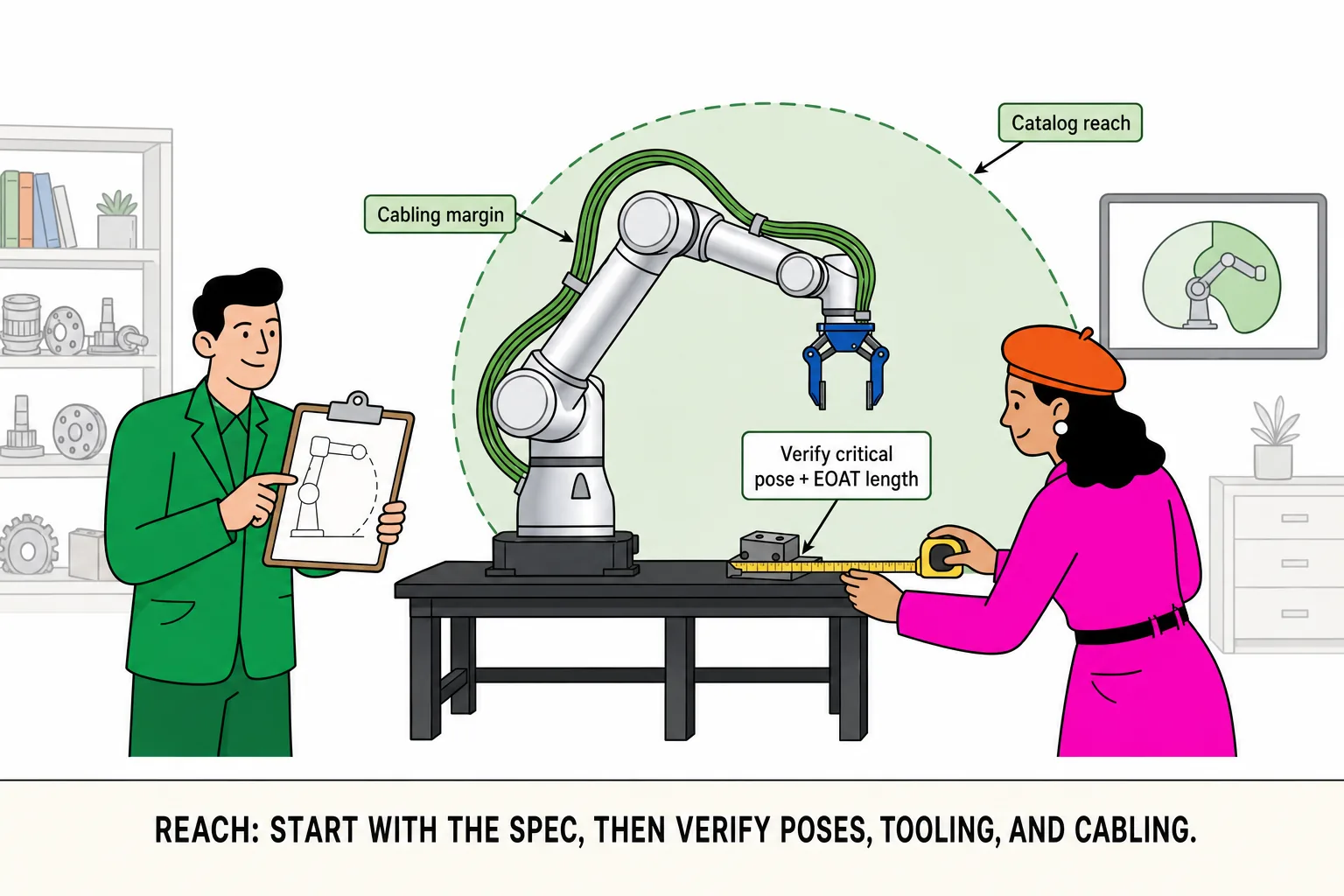
| 纸面臂展 — 未校核 TCP、姿态与线缆 | 调试阶段关键姿态够不到 | TCP + 关键姿态 + 退刀路径 → 臂展指南 |
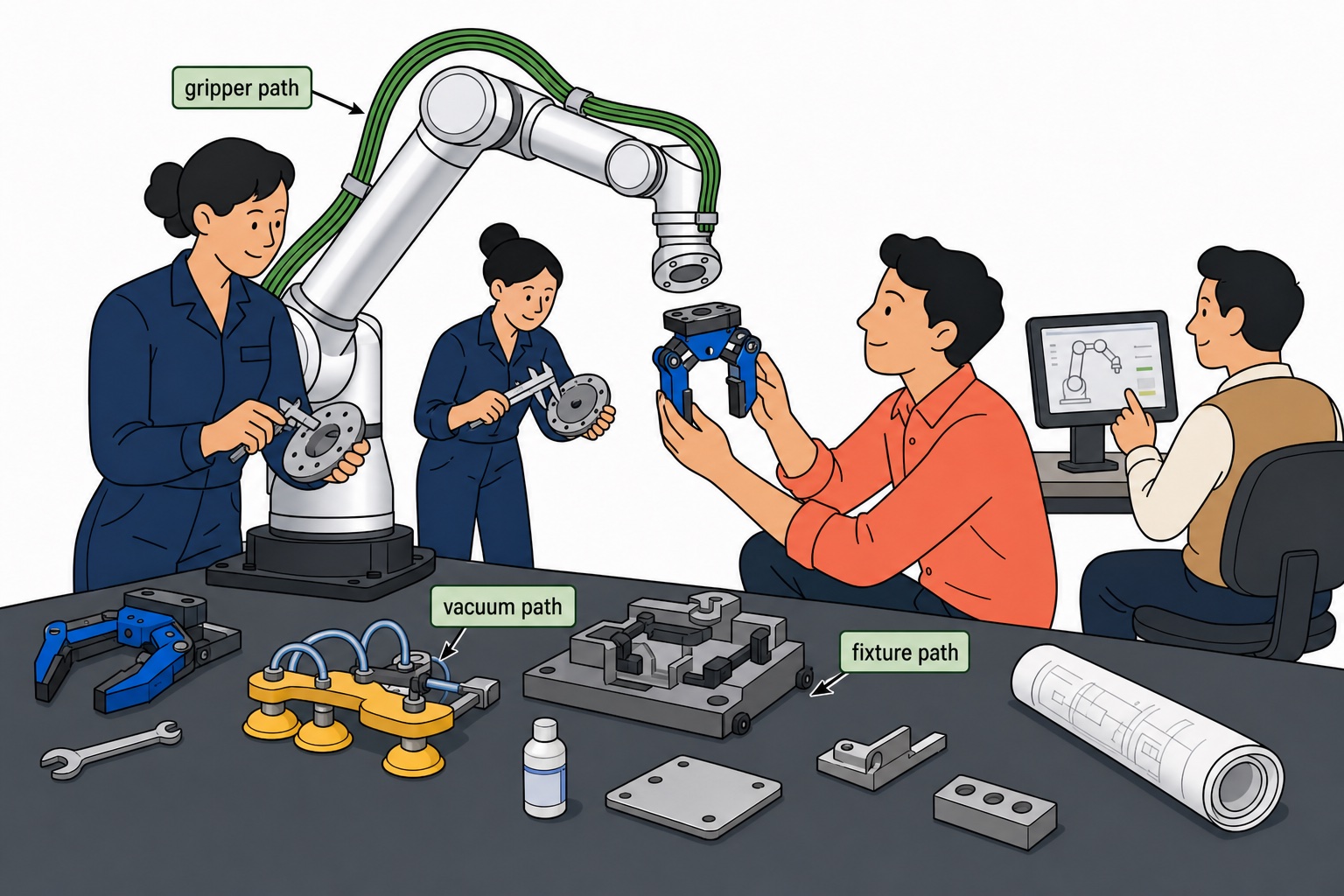
| 先定臂后定手 — EOAT 路径未定 | 第一圈打滑或赶不上节拍 | 先定夹爪 / 吸盘 / 治具路径 → 末端执行器指南 |
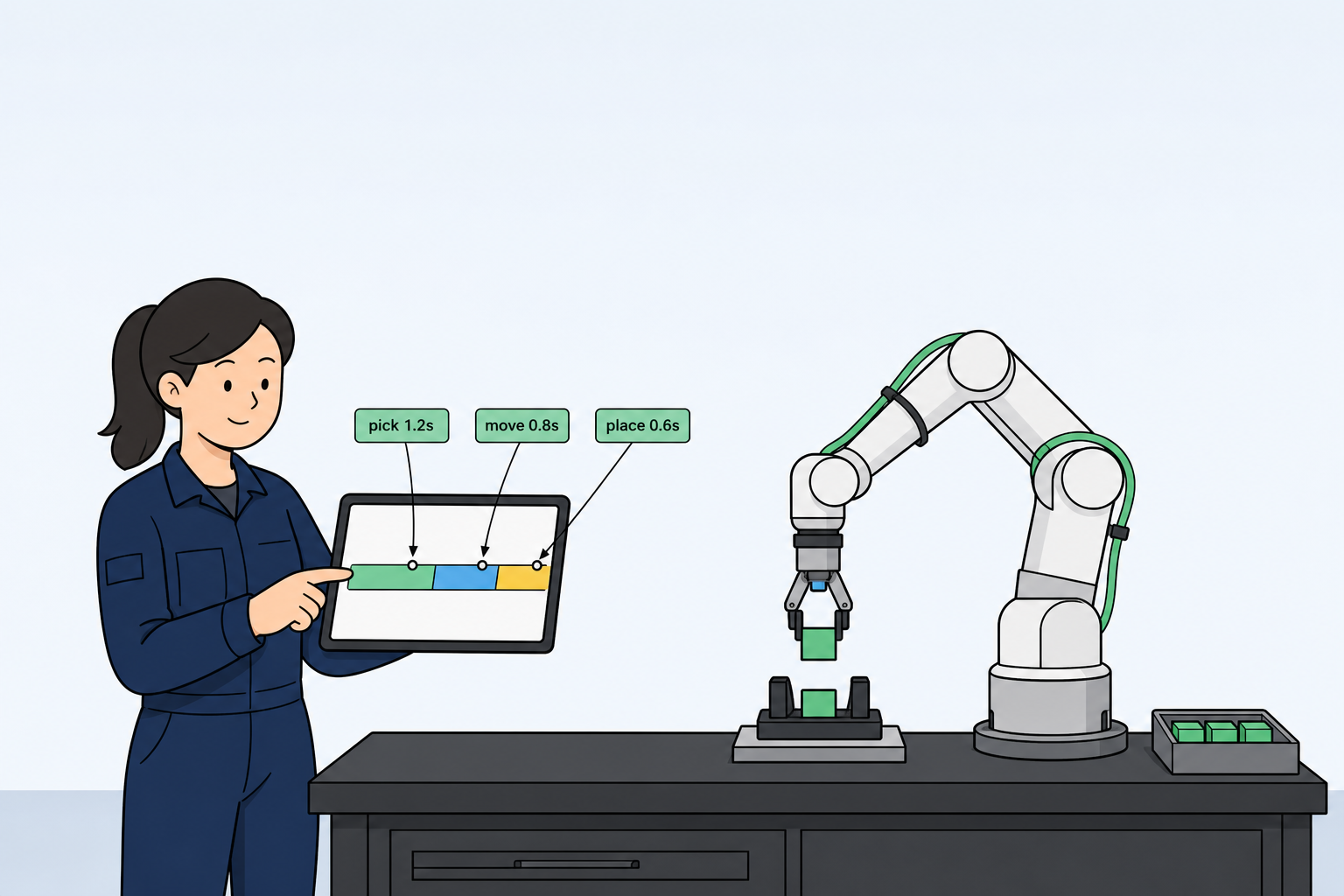
| 把峰值当日常负载 | 演示稳、量产后抖 | 用额定负载跑日常循环 → 负载指南 |
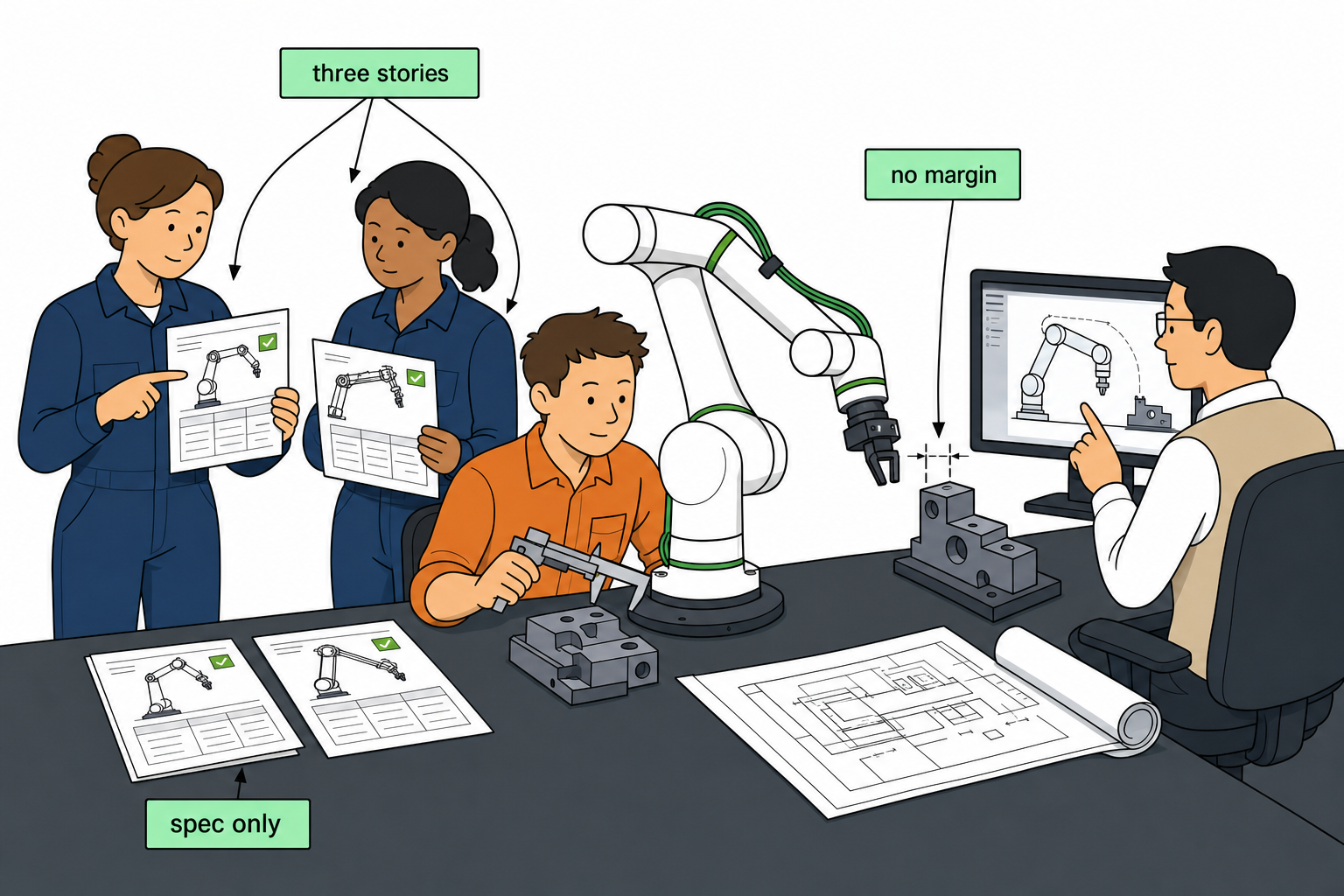
| 三套参数故事 — 团队未对齐一条链接 | 采购、工程、现场各报各数 | PO 前分享同一张对比链接 → 对比选型指南 |
公开证据口径:为什么“只看臂”最容易错
| 口径 | 公开区间 / 说法 | 来源 |
|---|---|---|
| EOAT 对额定负载的消耗 | 常见口径约 30–70%(装上末端后预算快速被吃掉) | Ocean Player 负载指南 · AMD Machines |
| 硬件 vs 集成在项目 TCO 中的占比 | 硬件约 25–40%,集成约 30–50% | AMD Machines TCO |
| EOAT 单列量级 | $2k–$40k+ | Robolist TCO |
| 集成工程量级 | $8k–$60k | Robolist TCO |
误区叠在一起:一个现场片段
PCB 托盘取放,工位中心离基座约 900 mm:团队因目录臂展够而缩到 r-Core。真空阀组与吸盘加长了 TCP;侧面进刀腕部不能保持伸直;满伸时线缆包还要弯折余量。单项看都「还行」,合在一起单元要返工。教训不是「先买更大臂」——而是校核最坏那一拍,不是 PDF 上最好看的尺寸。
报价前三分钟快审
| 核对项 | 为什么 |
|---|---|
| 最坏 TCP 负载 = 工件 + EOAT + 动态余量(额定,非峰值) | 避免掉料与反复停机 |
| 关键取放姿态 + EOAT 包络已校核 | 纸面臂展 ≠ 现场臂展 |
| EOAT 路径已选或标「现场待定」 | 手与臂一起报价 |
| 对比链接已发给采购、工程与现场 | PO 前只有一套口径 |
| 工具 I/O 与安全范围已写进报价包 | 避免控制柜 / PLC 惊喜 |
现场信号:看到这些通常意味着中招
| 现场信号 | 常对应的误区 | 该追问什么 |
|---|---|---|
| 换型后更容易掉料/保护停 | 只看工件单重 | EOAT 是否把你们的最坏 TCP 负载顶穿 |
| 满伸姿态一到就反复保护停 | 纸面臂展够不到 | 最远 TCP 点、退刀路径和线缆弯折余量有没有进包络 |
| demo 稳,量产节拍不稳 | 峰值当日常 | 量产循环是否按额定负载跑,等待与互锁有没有进节拍 |
| 明明合同签了,I/O 联调却临时加预算 | 三套参数故事 | PO 前有没有共享同一份 I/O/安全范围口径与验收规则 |
| 关键姿态差几毫米就失败 | 先定臂后定手 | EOAT 伸出与 TCP 定义是否已锁定到对比表里 |
把误区落成一页“能签字”的口径(建议模板)
| 模块 | 需要填什么 | 常见缺口 |
|---|---|---|
| 最坏件与最慢班次 | 列出样件/批次与边界条件 | 用“理想件”替代最坏件 |
| 关键姿态与 EOAT 包络 | 给出最远 TCP 点 + EOAT 伸出范围 | 只给法兰中心距离 |
| 负载口径与余量策略 | 日常按额定跑循环,留余量 | 峰值当日常 |
| 接口与验收边界 | I/O 清单、急停拓扑、通过/不过规则 | 默认“都在臂里” |
再回到现场那句教训:不是先买更大臂,而是校核最坏那一拍。把“最远点”从目录臂展换成 TCP;把“手”从默认吸盘/夹爪换成你们真正会用的 EOAT;再把等待与换型带进节拍拆分。这样同一条工位才会在调试和量产里表现一致。
五个误区逐项怎么验证
误区 1:只看工件单重
把负载口径从“工件净重”改成“TCP 最坏负载”:工件 + EOAT + 动态余量。报价里要看到 EOAT 质量/伸出范围,以及你们的最坏工件合计;日常循环按额定负载校核,而不是用峰值凑数。
误区 2:纸面臂展够不到
把“够得到中心距”升级成“关键取放姿态够得到”:拿到最远 TCP 点、退刀路径和线缆弯折余量。缺少姿态与退刀说明的臂展图,不是 RFQ 输入。
误区 3:先定臂后定手
EOAT 未定的项目必须标注为现场待定,并把“EOAT 定稿后重新校核 TCP/包络”写成验收里程碑。否则手没定时,臂无法定,后面只会越补越贵。
误区 4:峰值当日常负载
要求对比表按额定负载跑 daily cycles,留余量把工作包络压在合理区间。峰值只用于确认短时上限,不能当成“我们承诺的节拍上限”。
误区 5:团队对比表不对齐
PO 前强制共享同一条 Side-by-Side 或选型顾问输出,并在同一份 PDF 里写清最坏件、关键 TCP 姿态与余量口径。不同版本就是不同题目。
例子:从 900 mm 站位到“返工一周”
把原点偏差当成系统问题:最远放料点相对基座再偏 30–50 mm,EOAT 伸出再增加 40 mm,线缆弯折余量不足,就会在满伸姿态触发保护停。此时升档不一定省钱;先补 EOAT/TCP 余量与路径假设,再决定要不要换更高档位。
先补哪一处通常最省钱
如果你只能先做一个“最先补的缺口”,通常顺序是:
满伸保护停频发 → 先补 EOAT/TCP 余量与线缆弯折余量
demo 稳、量产抖 → 再补节拍拆分,把等待/互锁计进去
这两项都过线 → 最后才谈升档或换型,避免用更大臂掩盖错误输入
把下面三行粘进验收邮件,团队就不会“用更大臂掩盖错误输入”:
关键姿态:最远 TCP + 退刀路径已校核
负载口径:按额定跑 daily cycles,EOAT 已计入
节拍口径:含等待/互锁的逐段计时 ≤ takt
如果你只能先给一张图:画出关键姿态的 TCP 点位与退刀路径(同一张图别拆成邮件)。
补齐这三点,误区就不再靠感觉。