有些项目到安装第三周才集中讨论安全:机械臂已经就位,夹爪信号却发现 PLC 没有备用点;急停回路与工厂现有标准不一致;EHS 部门要求补风险评估。问题通常不是协作臂「不安全」,而是采购范围里从没写清安全与 I/O 的边界。
协作机器人往往占地更小、围栏更少,但你仍需要书面回答:正常运行时人会不会进入工作区、各段动作以什么速度运行、夹爪和设备的信号由谁接线、急停后如何复位。本文帮助你在报价前界定范围,不能替代正式的风险评估或当地法规要求。
报价前先对齐的四件事
1. 工作区边界 用地贴、光栅、区域扫描,或「固定工位 + 培训人员不进入」等方式划界。写清换型、上料时是否有人手进入。
2. 速度与人员距离 区分「无人靠近时的搬运速度」和「有人靠近时的降速或暂停策略」。
3. 急停与复位 急停按钮装在哪里、是否切断主接触器、如何与产线急停联锁、谁有权在急停后重新启动。
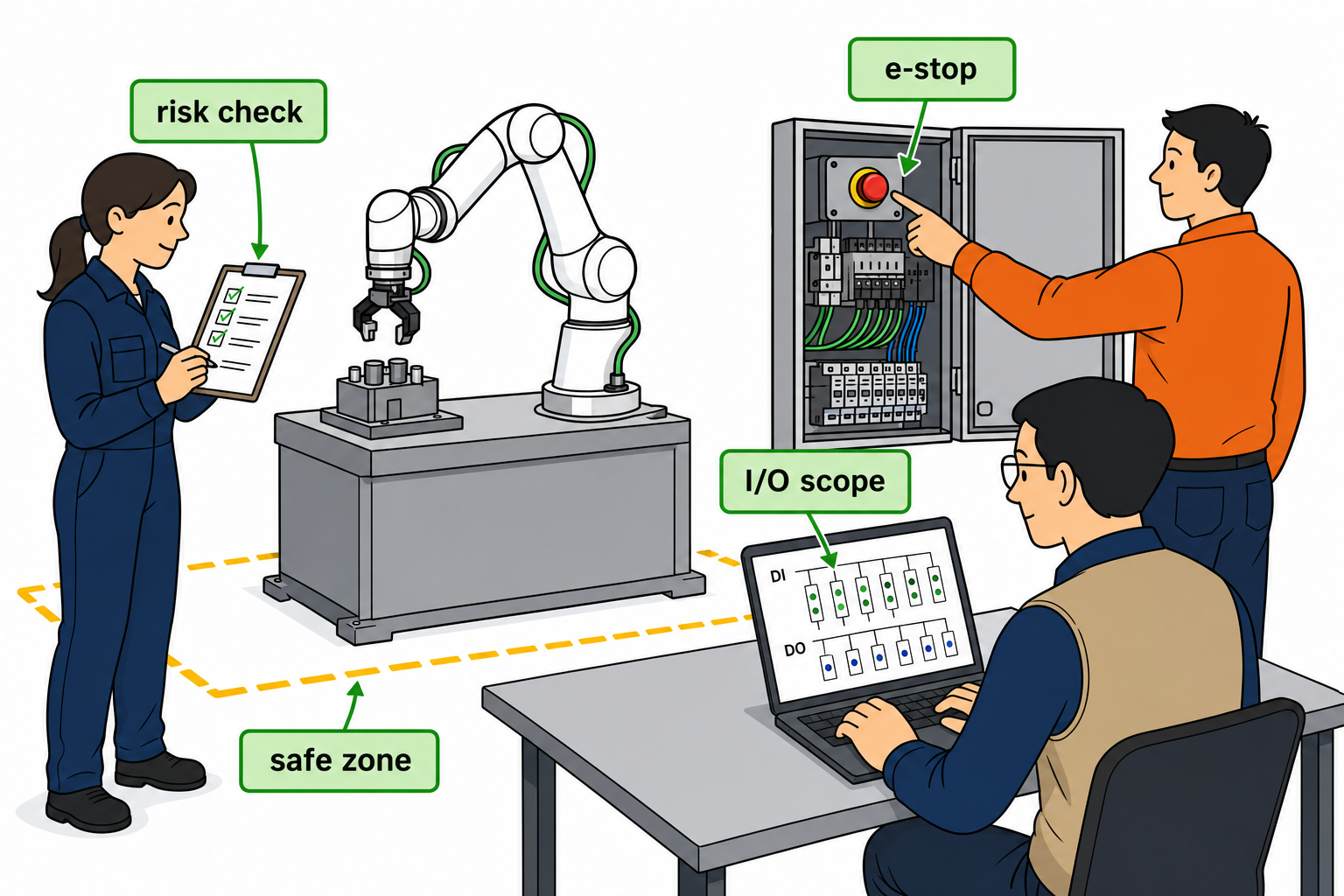
4. 工具 I/O 范围 夹爪、真空、视觉 OK、传送带互锁等需要多少数字输入/输出(DI/DO)、电压多少、阀组和线束由谁采购和接线。
几个容易出问题的假设
「协作 = 不用做风险评估。」 量产前 EHS 仍可能要求书面评估。至少准备一份简短的问题清单和边界说明。
「I/O 默认包含在机械臂报价里。」 调试时才发现要改 PLC,成本和周期都会上去。在报价单里单独列出 I/O 项。
「急停只装在机械臂上就够了。」 若与产线急停逻辑不一致,联锁和复位会反复扯皮。尽早与现有急停拓扑对齐。
「安全报价和末端工装分开谈。」 真空阀组、夹爪反馈直接影响接线和节拍。末端路径与 I/O 应一起定 → https://roooll.com/zh/insights/guides/how-to-choose-cobot-end-effector
采购、EHS、集成商各拿各的版本。 合同签订后容易对不上。把一页范围说明和对比链接发给所有相关方。
十五分钟对齐会:五个问题
开会前把下面五个问题写进纪要,通常就够启动报价:
正常运行时,人会进入机械臂工作范围吗?多久一次?
换型和上料谁做?是否需要区域暂停?
急停后如何复位?谁授权重新启动?
工具端需要哪些信号(夹紧反馈、真空检测、OK/NG 等)?
与 PLC 或 MES 的接口由谁开发、何时交付?
报价包里建议写清楚的内容
通常应包含在主体报价或附件中的:机械臂、控制柜、示教器;标准 DI/DO 数量说明;急停方案简述;工具 I/O 接线示意图(草案即可)。
往往需要单独报价或另行确认的:现场土建或围栏改造、大型 PLC 程序重写、第三方认证费用、洁净或防爆等特殊环境要求。
与其他选型项一起考虑
安全与 I/O 不是签完合同才出现的「附加项」。它和负载、臂展、节拍、布局一样,属于采购前应对齐的内容。《常见误区》里的快审清单也包含 I/O 与安全范围 → https://roooll.com/zh/insights/guides/common-cobot-selection-mistakes
下一步
横向对比控制箱与 I/O:https://roooll.com/zh/selector/comparison
有工位视频或电气图:https://roooll.com/zh/contact