我们见过这样的项目:负载、臂展、机型对比都过了,合同也签了。机械臂到货后才发现,基座偏了十几厘米,夹具多伸出一段,满伸时线缆扫到护栏——要改台面、重走气管或挪相邻设备。这类返工很少是「臂买小了」,而是布局在一开始就没画清楚。
布局规划要回答的问题很简单:在你真实的工位上,最难的那一圈动作,能不能稳定重复? 臂展指南帮你看「伸不伸得到」;布局帮你看「基座放哪、周围留多少、人和设备会不会挡路」。
先画一页草图,不必上三维
在 A3 纸或平板上画俯视图,必要时加一张侧视图(看高度和线缆)。标这五件事就够了:
基座位置与固定方式 — 螺栓孔、台面厚度、旁边有没有振动源
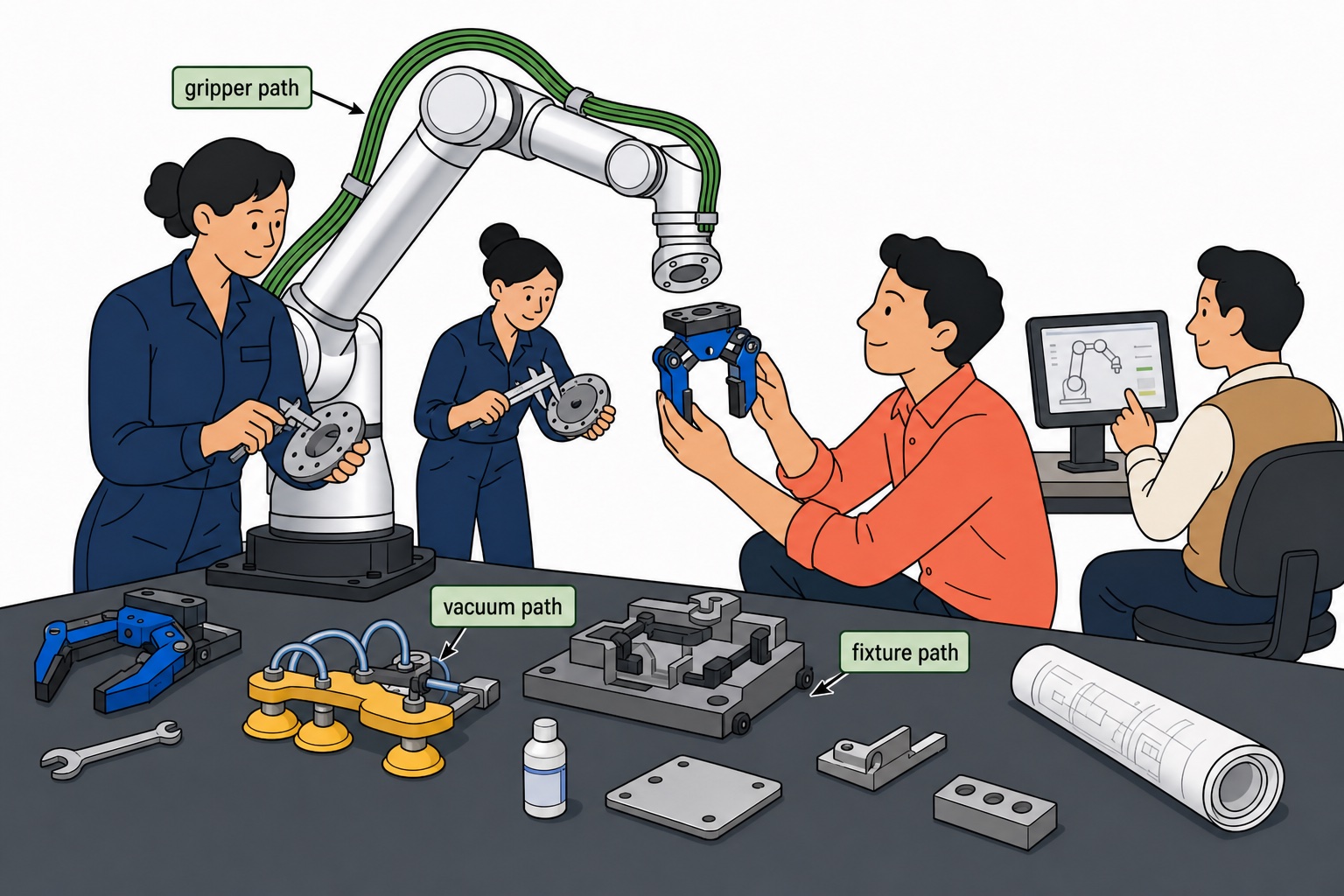
取料点与放料点 — 用末端中心点(TCP),不是「零件大概在这」
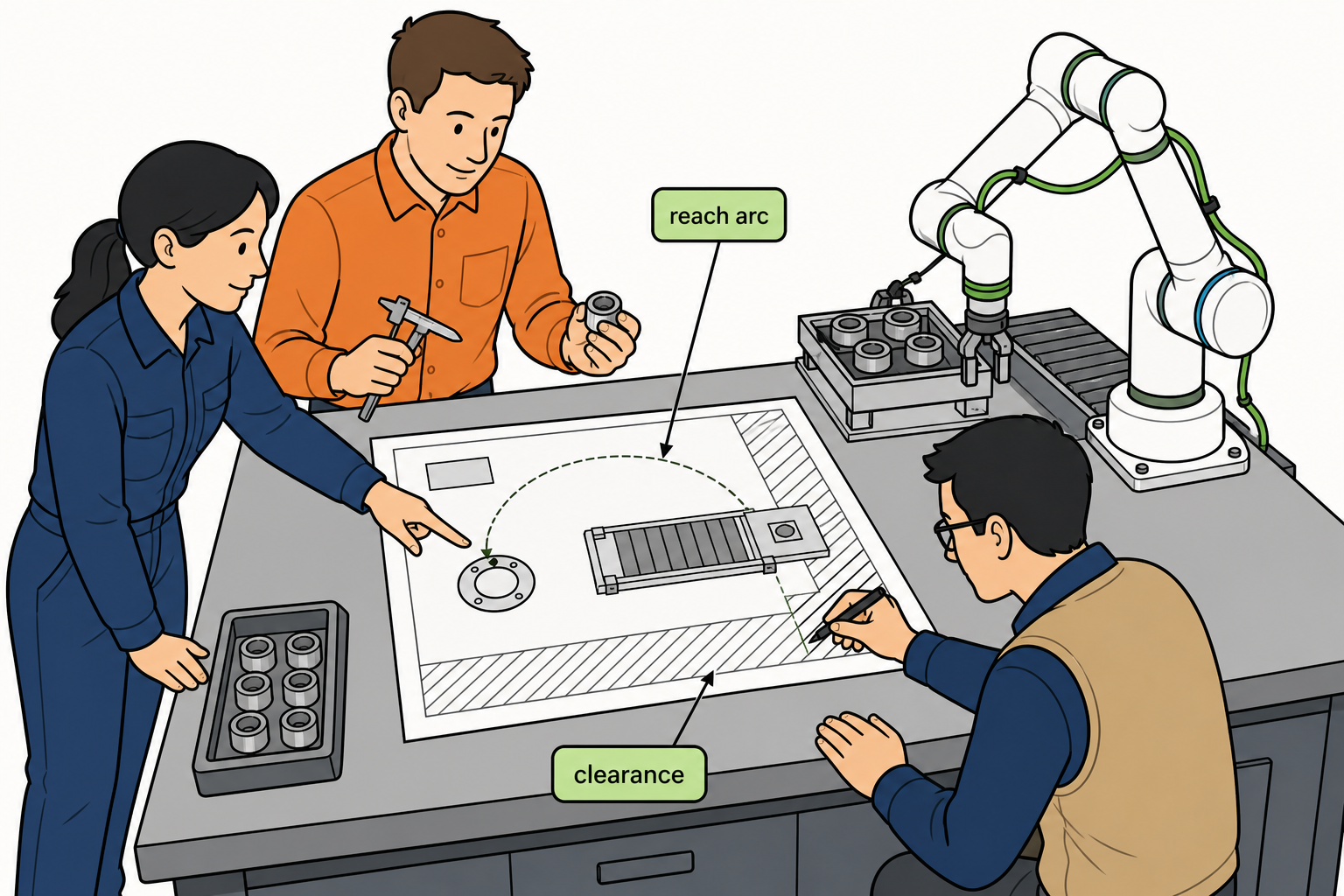
满伸时的臂与工装轮廓 — 虚线弧或包络,要算上末端工装长度
障碍与净空 — 相邻设备、罩壳、人站立的位置、线槽与气管
退刀与维护空间 — 故障时能否接近法兰和夹爪,而不进入运动区域
五个常见疏漏
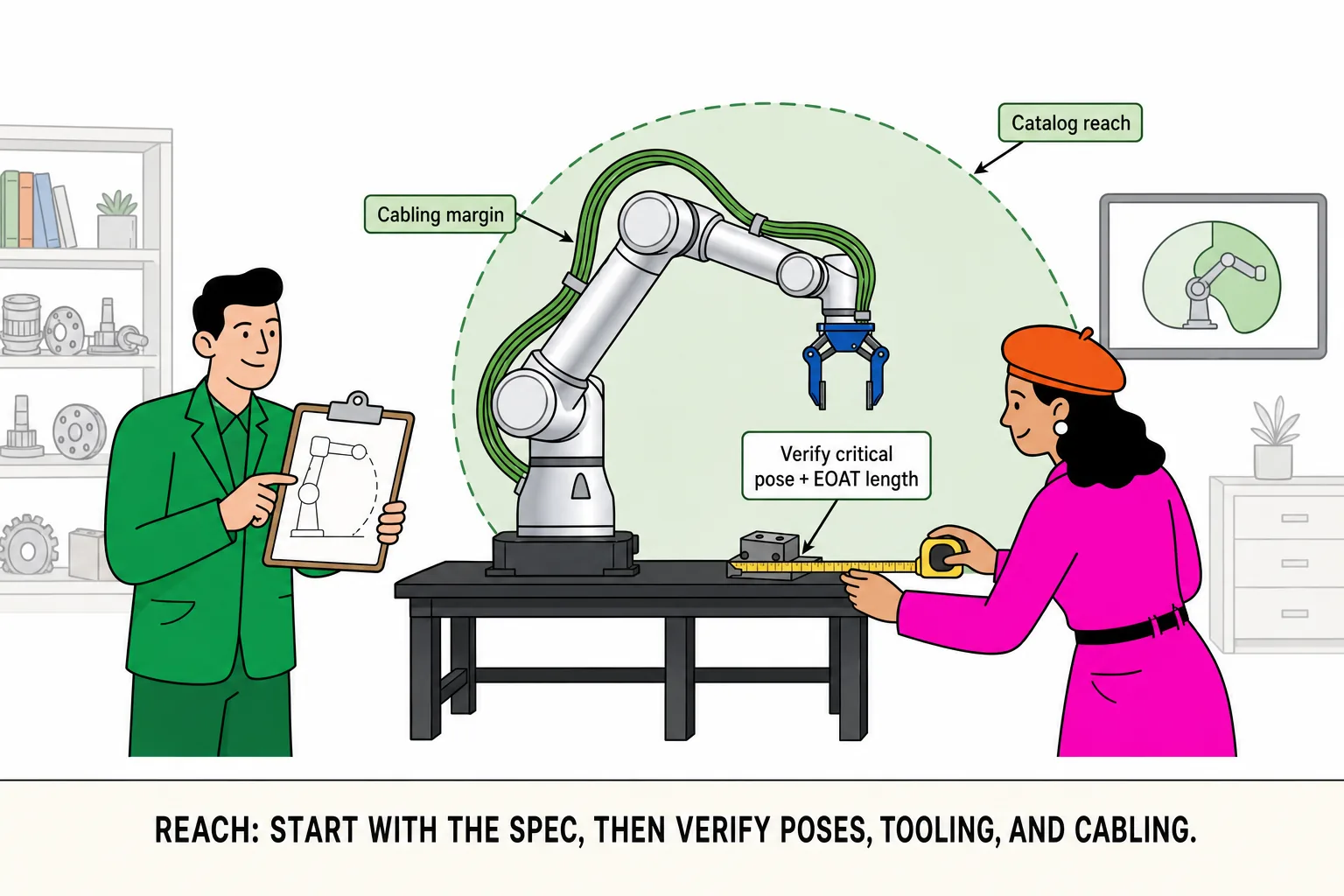
只量中心距离,不校核姿态。 基座到工位中心 900 mm,规格臂展 922 mm,看起来有余量;但侧面进刀、腕部不能拉直、工装又占去一段,最远工位那一拍仍可能够不到。应结合关键姿态与 EOAT 一起校核 → https://roooll.com/zh/insights/guides/how-to-calculate-cobot-reach
基座贴边,没留线缆弯折空间。 满伸时外侧线缆包需要弯曲余量,否则容易触发保护停机。侧视图里把线缆路径画出来。
先定臂,后改台面。 臂到了再动焊、改孔,周期和成本都会上去。布局应与末端工装路径同步定 → https://roooll.com/zh/insights/guides/how-to-choose-cobot-end-effector
第一个项目就想包整条线。 更稳妥的做法是选一个工位试点:节拍压力最大、换型少、工件一致,成功后再复制。
布局图没有发给采购和集成商。 三方各画各的,报价和调试容易对不上。把一页 PDF 和对比链接一起发出。
从一个小工位开始
首套单元不必覆盖整线。选一个节拍最紧、换型最少的工位,写清三条成功标准:
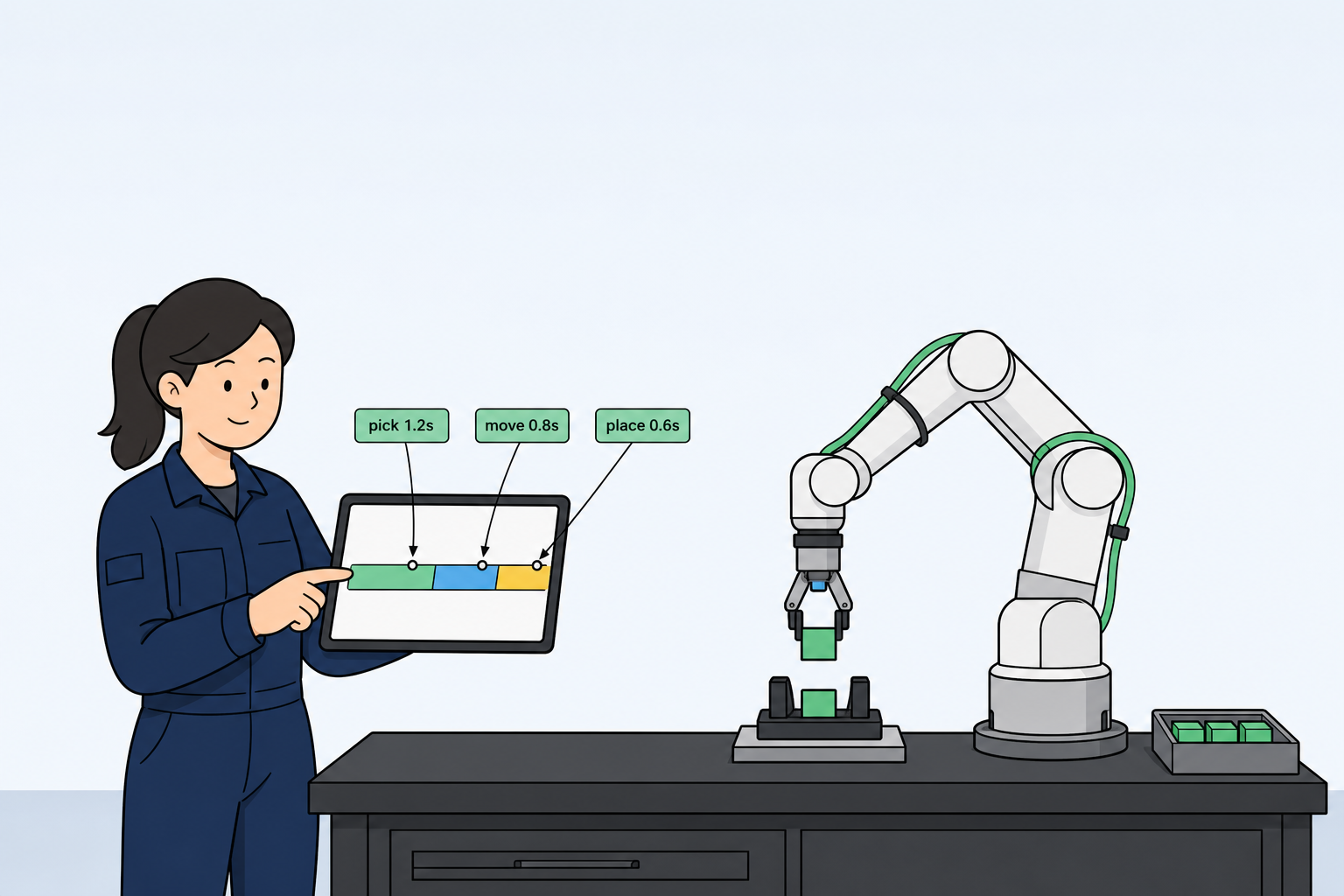
稳定循环时间不超过产线节拍(建议留 10–15% 余量)→ https://roooll.com/zh/insights/guides/how-to-calculate-cobot-cycle-time
关键姿态无干涉,退刀路径可重复
换型步骤写进作业指导(哪怕只是换托盘)
试点跑顺,再扩展到相邻工位,比一次铺开更可控。
发给集成商的一页信息
复制下面清单,填好后随询价或对比链接发出:
俯视图 + 关键侧视图(基座、TCP 取放点、主要障碍)
最坏负载与末端工装概要(可参考负载指南)
目标节拍与单班产量
上料或换型时,是否有人进入工作区
电源、气源、网络接口位置
验收标准(例如:连续运行 N 圈无掉料、无保护停机)
下一步
有草图或工位视频:https://roooll.com/zh/contact