In procurement meetings, someone plays an industrial arm video—fast takt, heavy payload. Someone else pushes a cobot—small footprint, operator nearby for changeover. Both can be right—for different lines.
The practical move is to name two different bets, then split the project with a few floor questions.
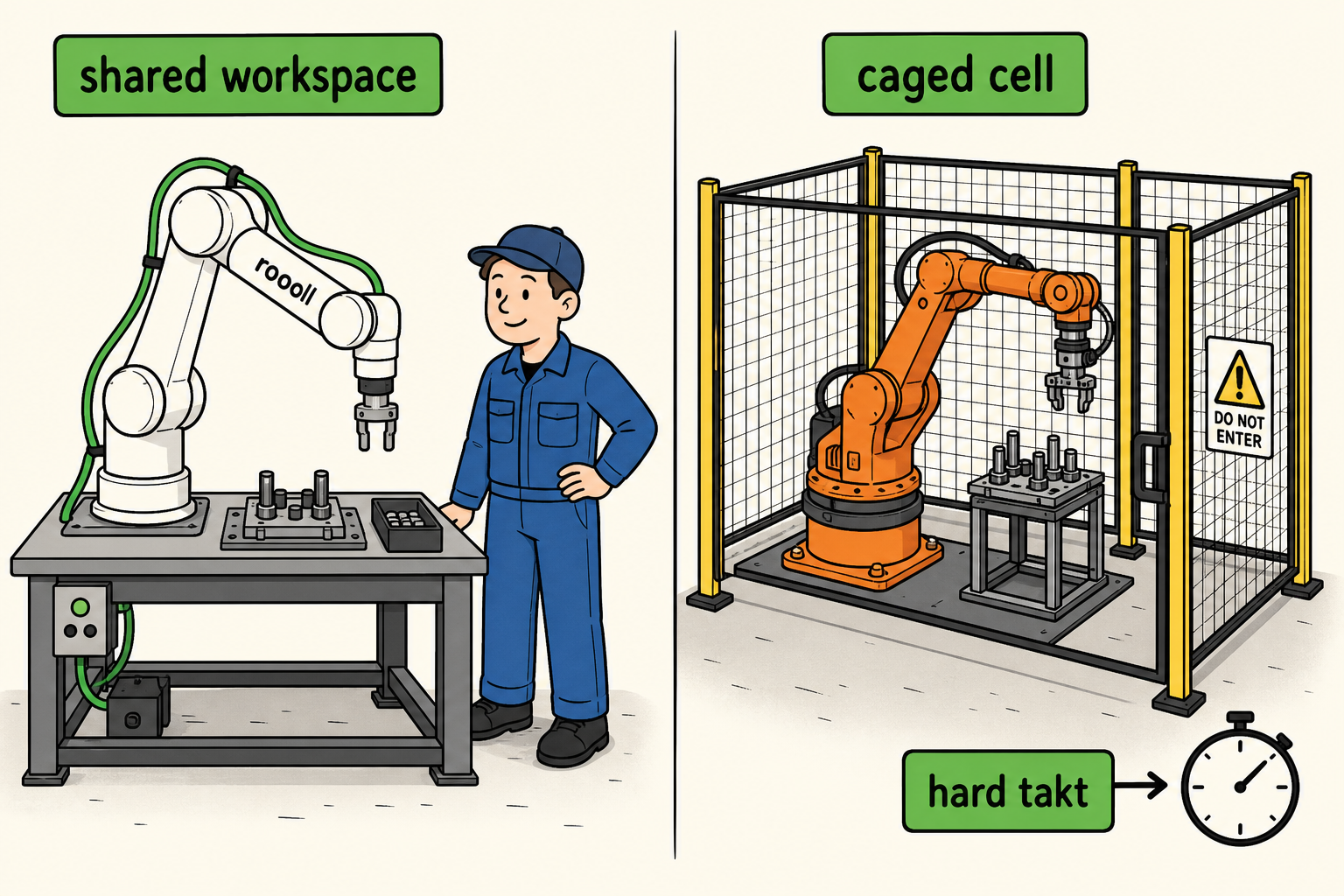
Question one: do people work in the same station?
Collaborative robotic arms assume a shared workspace—loading, alignment, inspection, and exceptions happen beside the arm, not outside a cage.
Traditional industrial arms usually sit in a guarded cell. Every human entry stops or slows the cycle. Takt can be aggressive; every intervention breaks rhythm.
| Your floor | Often leans toward |
|---|---|
| People load, tend, or inspect beside the arm | Cobot → What is a collaborative robot (cobot)? |
| People can leave the station for full unmanned runs | Caged industrial arm |
| “Unmanned on paper, people in every peak shift” | Size for the worst shift, not the ideal one |
Collaborative does not skip safety. Scope zones, speeds, e-stop, and I/O before you quote → Safety & I/O guide
Question two: how hard is takt?
Catalog max TCP speed is not your stable cycle time—but takt pressure still splits the classes:
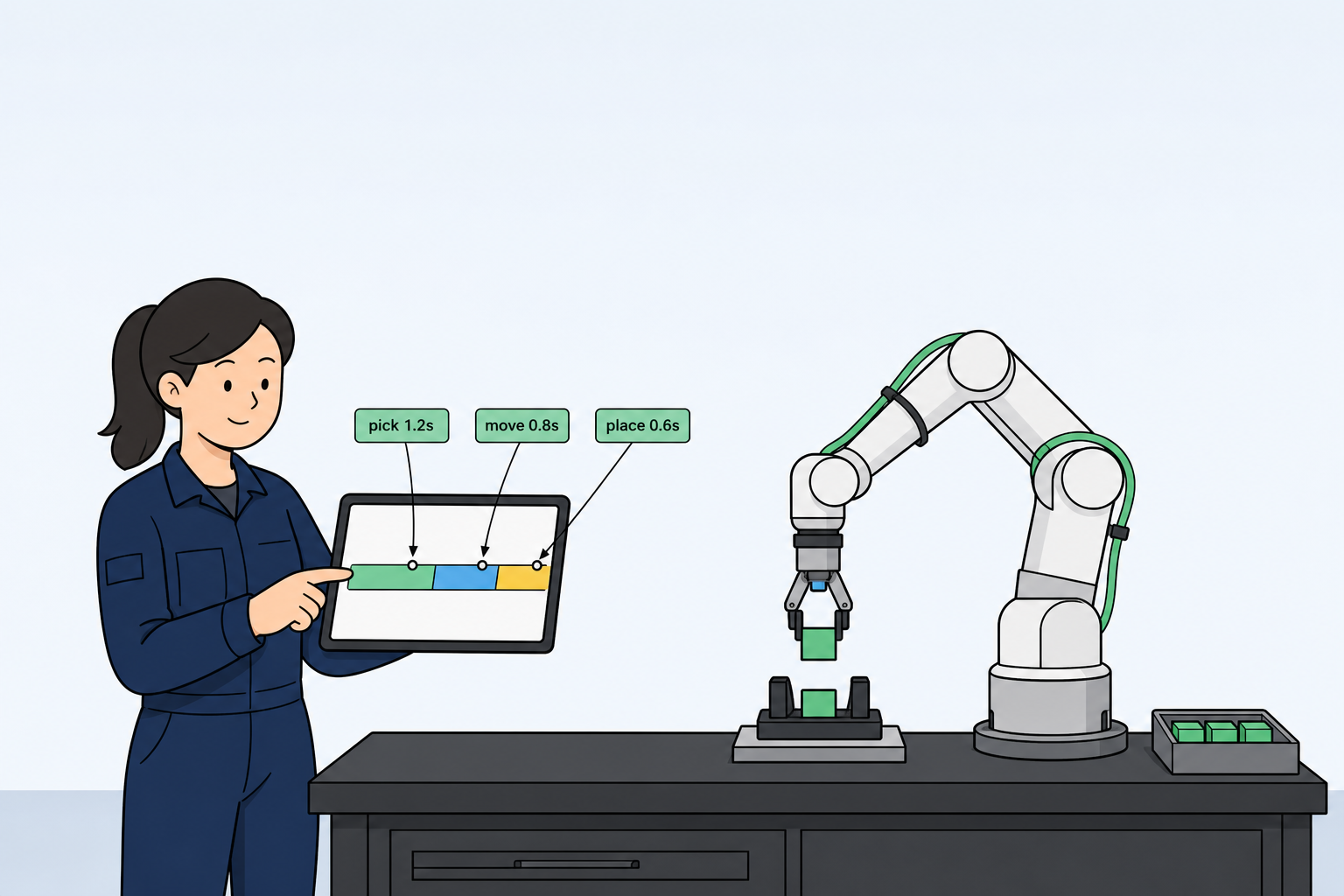
Cobots: sweet spot is often moderate, repeatable pick-and-place—seconds to low teens per loop, with a person for exceptions
Industrial arms: when takt sits in the 1–3 s range, three shifts, little room to wait on people, dedicated automation often wins
Break pick, move, place, gripper, vacuum, and waits into a beat list → Cycle time guide
If the bottleneck is “wait for the CNC door” or “wait for vision OK,” a bigger arm will not fix it—that is integration scope.
Question three: how often do SKUs change?
Many SKUs, small batches, frequent program edits → cobot cells often retool faster than fences and hard automation
One SKU for years, takt maxed out → a dedicated industrial line may pencil better
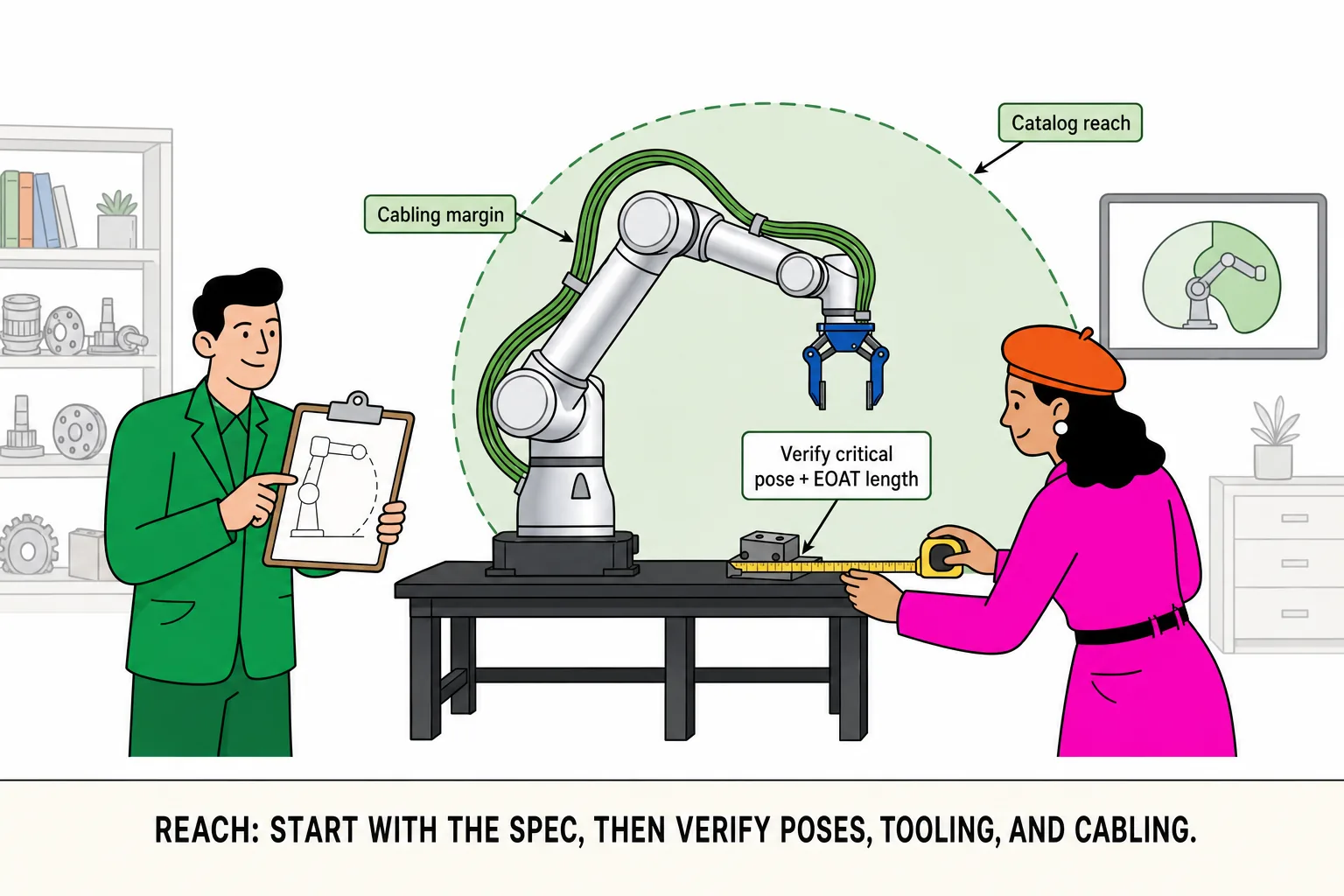
Question four: are payload and reach real?
Both classes need worst-case TCP math: part + EOAT + cabling, on rated payload—not peak.
Payload → Payload guide
Reach and pose → Reach guide · Workcell layout guide
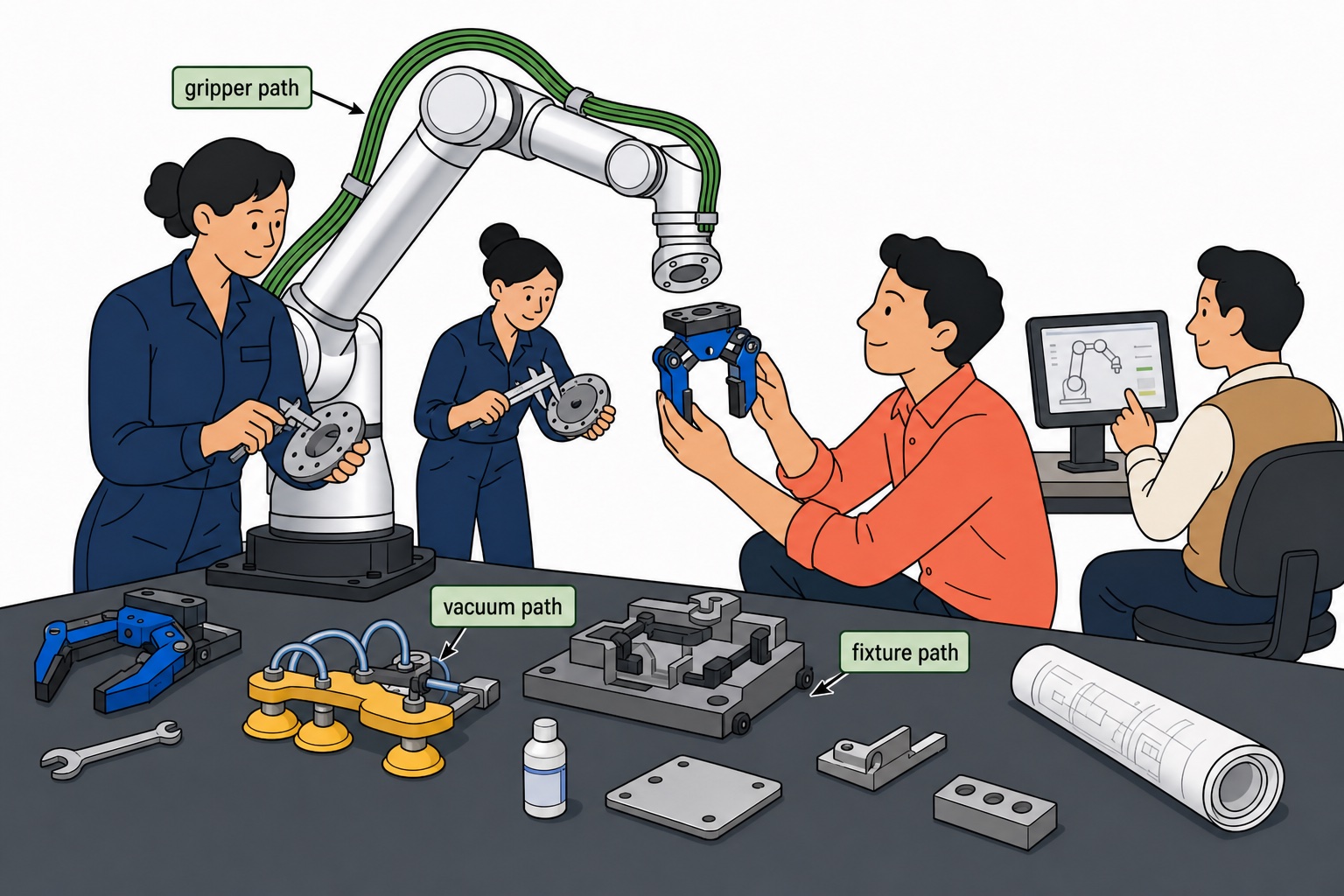
Hand undecided → End-effector guide
Quick split
| Signal | Often start with |
|---|---|
| Shared station, many changeovers, reversible pilot | Cobot (r-Lite / r-Core / r-Reach) |
| Unmanned, extreme takt, heavy continuous run | Industrial arm or dedicated machine |
| Payload/reach at cobot rated edge | Side-by-Side Comparison for r-Max / r-Ultra |
| Task not defined yet | Task readiness guide |
We often see the same mis-bet: “industrial looks more serious,” but the line still needs three manual changeovers a day—each door cycle eats the takt win. Or: cobot chosen to skip guarding when takt is four seconds and there is no room for a person—protective stops become daily life.