第一次接触自动化采购,规格表里会出现 协作机器人、cobot、机械臂 几个词——它们常常指同一类设备:多关节、可编程、在产线或实验室里替人做重复取放、装配、检测的 协作机械臂。
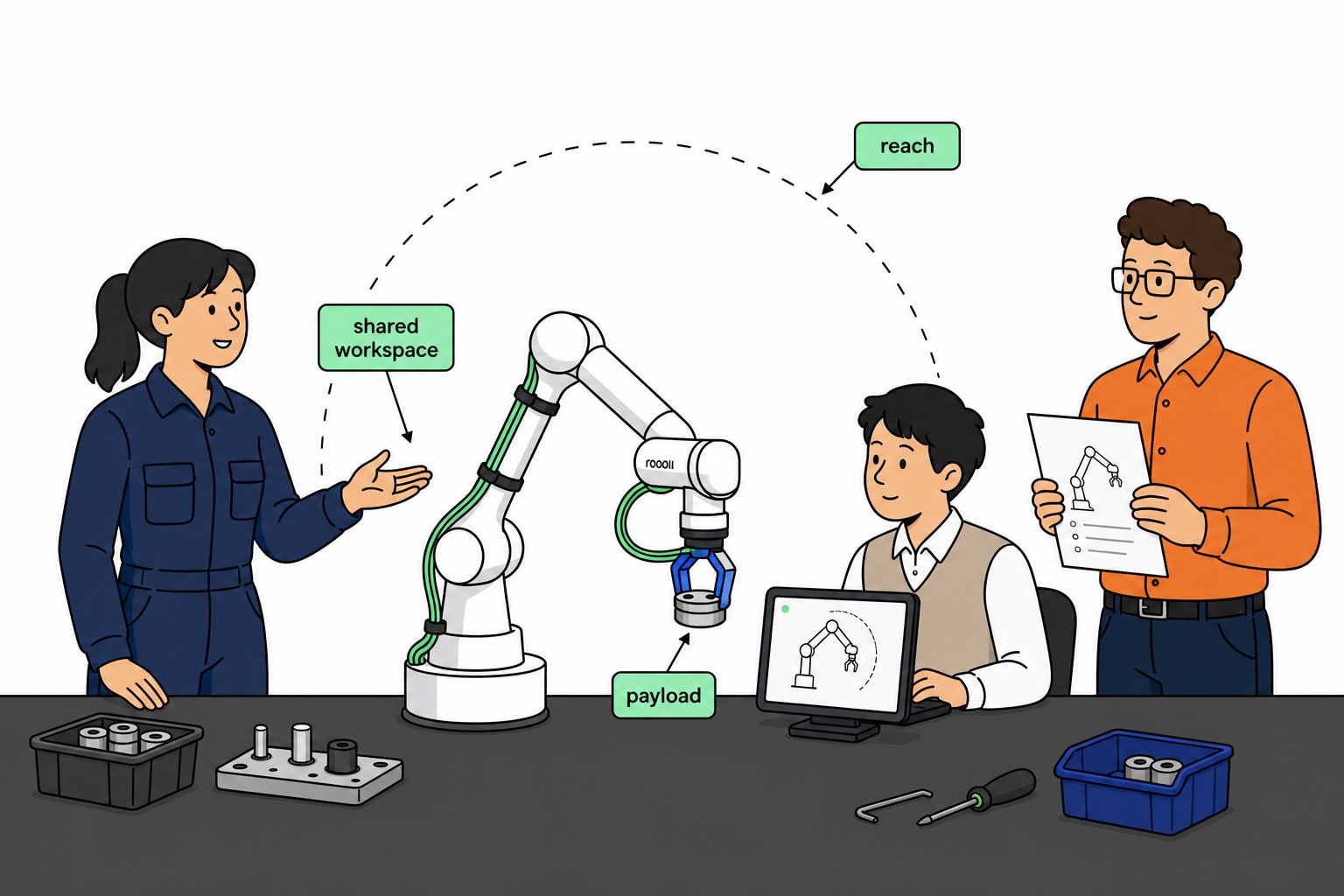
和传统工业机械臂最大的区别不在「会不会动」,而在 人和臂能不能共享同一片工作区。协作机器人通常更紧凑、部署更快,并带有力控或速度限制等设计,让人员在旁换料、对位或抽检时风险可控。「协作」不等于零安全责任——仍要划界、评估速度与人距,采购前把安全与 I/O 写进范围 → 安全与 I/O 指南
协作机器人一般用在哪
按 行业 → 典型工位场景 对照,便于你对号入座(同一行业也常有多条产线,下表列的是常见起点):
| 行业 | 典型协作机械臂工位 / 场景 |
|---|---|
| 智能制造 / 一般工业 | 装配、锁螺丝、焊接辅助、视觉检测、线边补料、换型辅助 |
| 汽车零部件 | 小总成装配、机加上下料、检具抽检、涂胶 / 点胶辅助 |
| 电子与 PCB | 板级点胶、AOI 复检、插件 / 贴装辅助、测试上下料 |
| 半导体与电子装联 | 测试上下料、载具 / 老化架转移、复检工位重复取放、受控区域有限协作(按洁净与工艺等级选型) |
| 机加工与金属 | CNC / 车铣上下料、去毛刺辅助、冲压线取放、量具抽检 |
| 橡胶、塑料与注塑 | 注塑机上下料、去浇口 / 修边辅助、嵌件安装、模内贴标辅助 |
| 新能源与电池 | 电芯 / 模组搬运、泄漏检测上下料、PACK 线辅助装配、EOL 测试工位 |
| 物流与仓储 | 码垛 / 拆垛、分拣辅助、托盘化、末端装箱 |
| 电商与履约仓储 | 包裹分拣辅助、订单组包、退货复检、贴标 / 称重前取放 |
| 食品与包装(产线侧) | 装箱、贴标辅助、轻量分拣(须按食品 / 洁净等级选型) |
| 日化与消费品 | 灌装 / 旋盖辅助、礼盒装盒、多 SKU 换型取放 |
| 医疗与临床检验 | 分析仪上样、样本 / 板位转移、重复 bench 移液、异常走位可追溯 |
| 医院康复与理疗 | 康复辅助轨迹、理疗手法路径复现(须按临床流程与法规界定范围) |
| 医药与生物 | 孔板 / 载具转移、洁净 bench 重复动作、批次换型按程序切换 |
| 质量与计量 | CMM / 检具取样、重复测量点位、SPC 抽检上下料 |
| 零售与前台服务 | 饮品 / 冰淇淋按配方出杯、档口重复备餐、智慧餐饮前台节拍 |
| 教育与科研 | 课程演示路径、竞赛季快速部署、科研 bench 可编程取放 |
| 消费与 3C 包装 | 装盒、封箱辅助、多 SKU 换型取放 |
→ Roooll 分行业应用:智能制造应用 · 医疗与实验室应用 · 零售与服务应用 · 教育与科研应用
Roooll r 系列现包含 r-Lite(标准 / 一体式 / 移动短臂 / 移动长臂)、r-Core、r-Reach、r-Max(16 kg / 20 kg)与 r-Ultra 等档位——从轻载紧凑工位、线边默认配置,到长臂展跨工位与重载搬运,选型时先搞懂下面几个词,再打开对比表会省很多时间。
选型前必懂的五个词
Payload(负载) — 臂在稳定运行时能带多少重量
目录里的 额定负载 是连续工作的参考值;峰值/瞬时负载 只适用于短促动作。算负载时要把 工件 + 夹爪/吸盘/转接件 + 外侧线缆 一起算——不是只称零件净重。负载估低了,现场常见掉料、保护停机、节拍漂移。
→ 怎么算、怎么留余量:负载指南
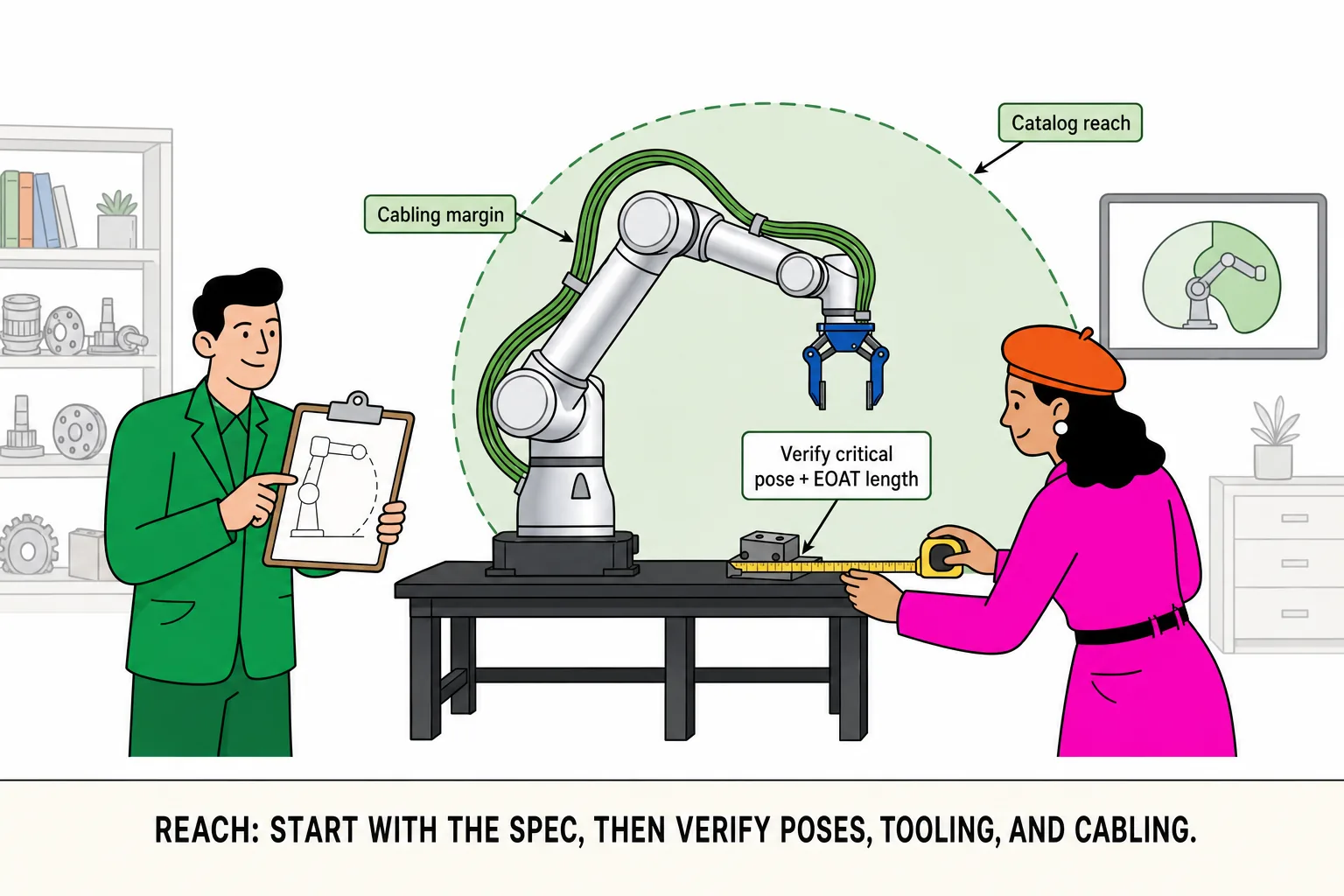
Reach(臂展 / 工作半径) — 关键姿态下够不得到
规格表上的 工作半径 是厂商在标准条件下测的参考值,回答的是「标称能伸多远」——不是你工位在真实取放角度下 一定够得到。要把 TCP(见下)、末端工装长度、线缆余量和障碍一起算进去。
→ 怎么校核 catalog reach 与现场姿态:臂展指南
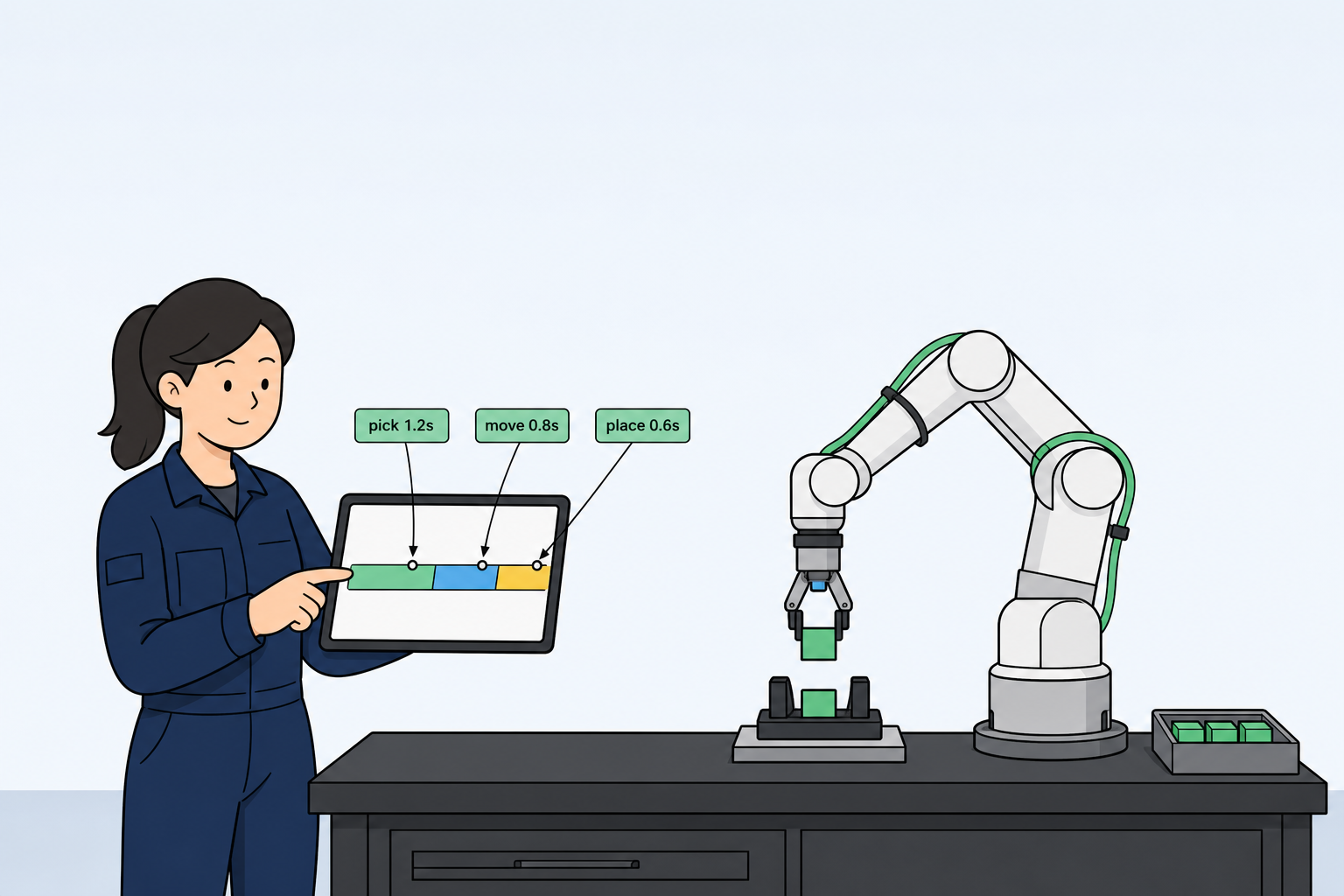
Cycle time(节拍 / 单件循环时间) — 一整圈动作实际要几秒
规格表上的最大 TCP 速度 ≠ 你工位上的稳定节拍。要把取料、搬运、放料、夹爪开闭、真空建立/破真空、等待检测等 逐项加总,再用真实工件试跑核对。
→ 怎么估节拍与产线 takt:节拍指南
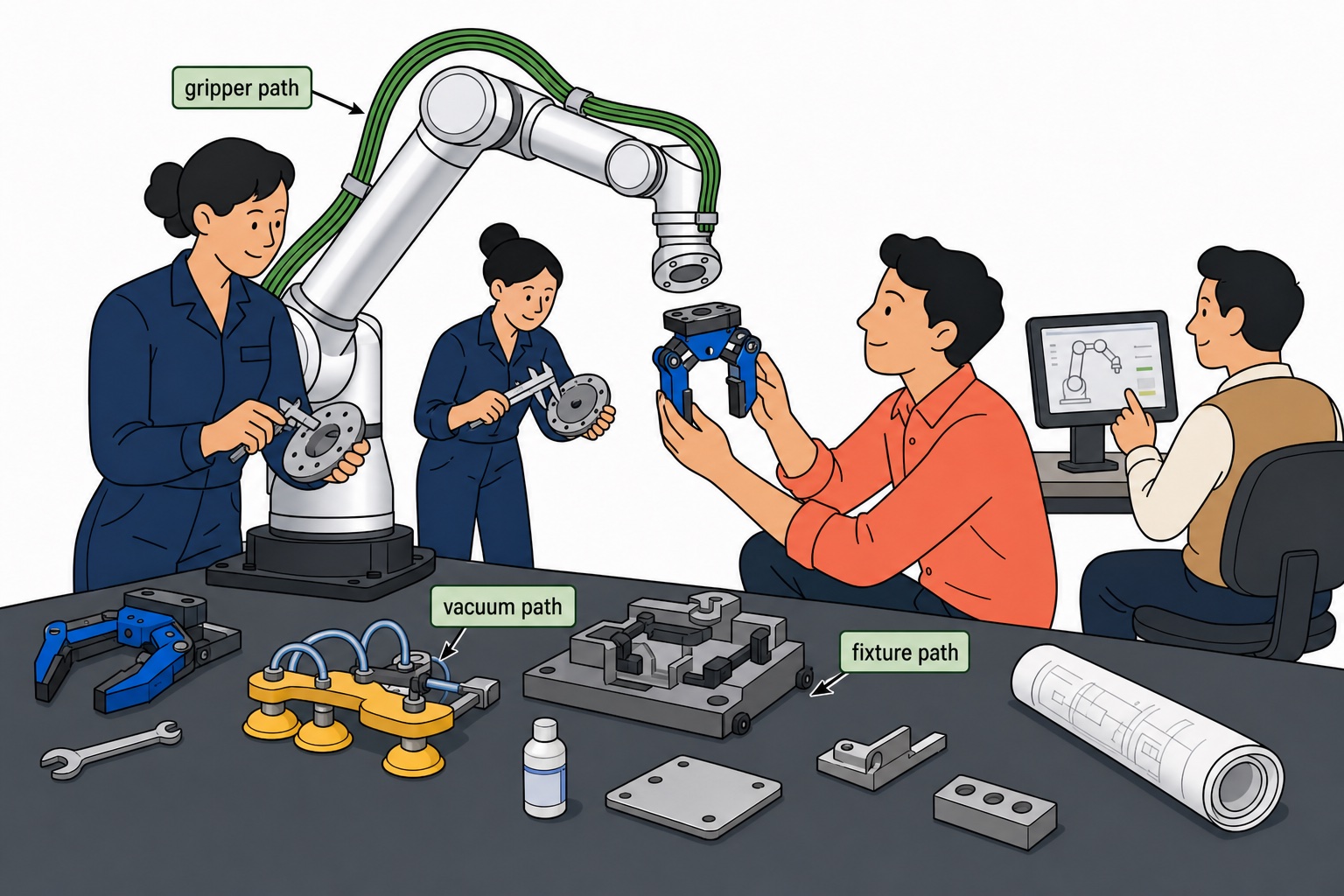
EOAT(末端执行器) — 臂的「手」
夹爪、吸盘、定制治具、转接法兰——任务和机器人法兰之间的最后一道界面。路径选错(该吸却夹、该定位却硬夹),负载和节拍账都会错。
→ 夹爪 / 吸盘 / 治具怎么选:末端执行器指南
TCP(Tool Center Point,工具中心点) — 编程与测量的参考点
运动指令和轨迹通常围绕 TCP 定义,而不是法兰中心。换不同末端执行器,TCP 位置会变;量「臂展够不够」时,量的也应该是 TCP 到基座的距离,不是只量到法兰。
常见误解(别在报价前踩坑)
「协作 = 不用谈安全。」 仍要界定工作区、急停与 I/O → 安全与 I/O 指南(见上)
「只看零件重量。」 漏算 EOAT 与线缆 → 负载指南
「规格臂展够就一定够。」 关键姿态、退刀路径没校核 → 臂展指南
「演示能跑 = 节拍 OK。」 量产节拍要含等待与最慢一圈 → 节拍指南
→ 更多选型误区:选型误区指南