我们见过这样的项目:邮件里写了工件重量、工位尺寸、目标节拍,对比表也锁定了 r-Core。机械臂到货后才发现:工件表面太滑、换型要改治具但没人排期、满伸时仍够不到最远托盘——问题很少是「臂买错了」,而是没人在一开始评估这项任务是否适合自动化。
「适合自动化」不是一句口号。它意味着:在你真实的工位上,最坏那一拍能否用协作机器人稳定重复——工件可抓、负载有余量、姿态够得到、节拍跟得上、环境允许、集成边界写清楚,最后才谈选哪一档机械臂。
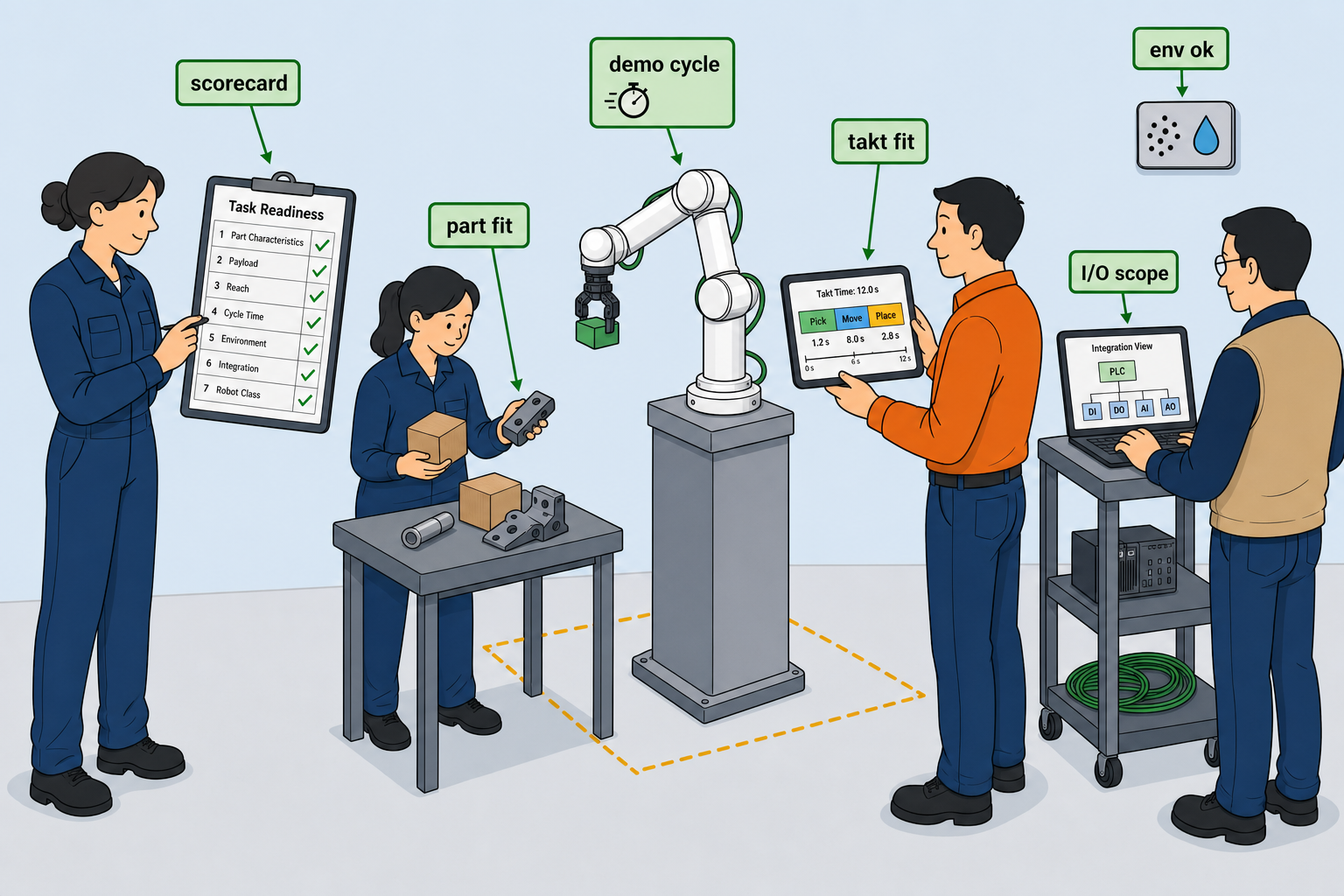
本文是一张 Task Readiness 核对表:七项按顺序过一遍。每一项下面有「合格信号 / 红灯信号」和对应深指南链接;全部绿灯后,再用 智能选型向导 或 横向对比 锁定 r 系列档位。无论你是终端用户、集成商还是设备工程团队,都可以把这张表当作第一次技术对齐的共用语言。
工件特性(Part Characteristics)
自动化从工件开始,不是从规格表开始。先回答:
形状与表面:规则几何还是异形?是否需要定位销、视觉或柔性夹持?
一致性:来料公差、方向、批次间差异是否在可接受范围?
易损与洁净:会不会划伤、沾污、或需要防静电/洁净处理?
合格信号: 最坏样件能稳定夹持或吸牢;来料方向可约束或可被传感器纠正。 红灯信号: 「到了现场再想办法」——没有试抓视频或样件,就急着定机型。
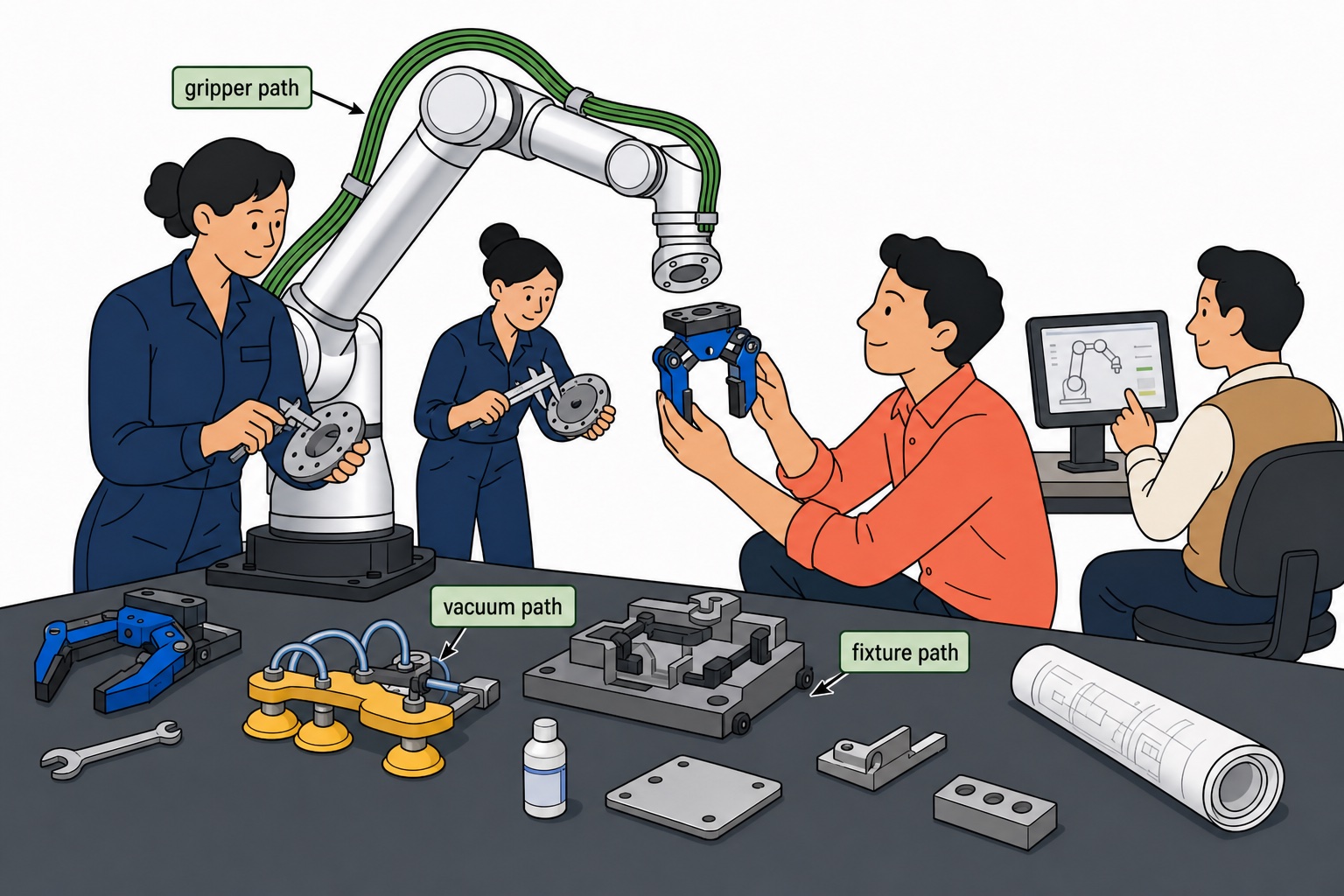
→ 末端路径与治具:末端执行器指南
负载要求(Payload Requirements)
负载不是工件单重。最坏 TCP 负载 = 工件 + 末端执行器 + 阀组/线缆 + 动态余量,日常循环按额定负载校核,不用峰值凑数。
合格信号: 额定负载下有余量;加速/减速不会触发反复保护停机。 红灯信号: 讨论里只报工件克数;真空吸盘尺寸未定;演示用轻载、量产后加重。
→ 负载指南
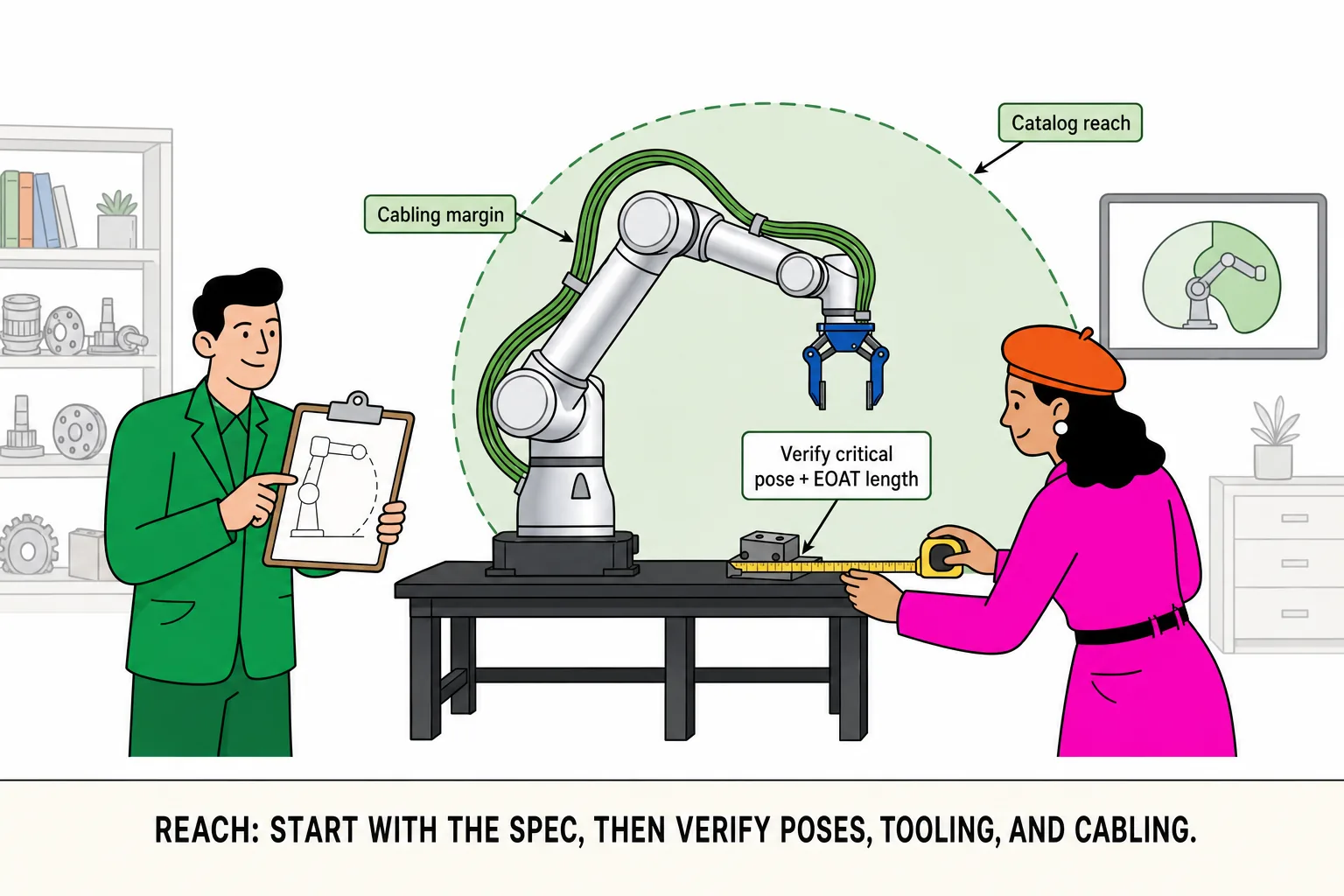
臂展要求(Reach Requirements)
纸面臂展 ≠ 现场臂展。要校核 TCP 在关键取放姿态 下的距离,加上 EOAT 长度、腕部角度、线缆弯折余量。
合格信号: 最远工位在关键姿态下仍清障;退刀路径可重复。 红灯信号: 只量基座到工位中心距离;侧向进刀、满伸时腕部不能拉直。
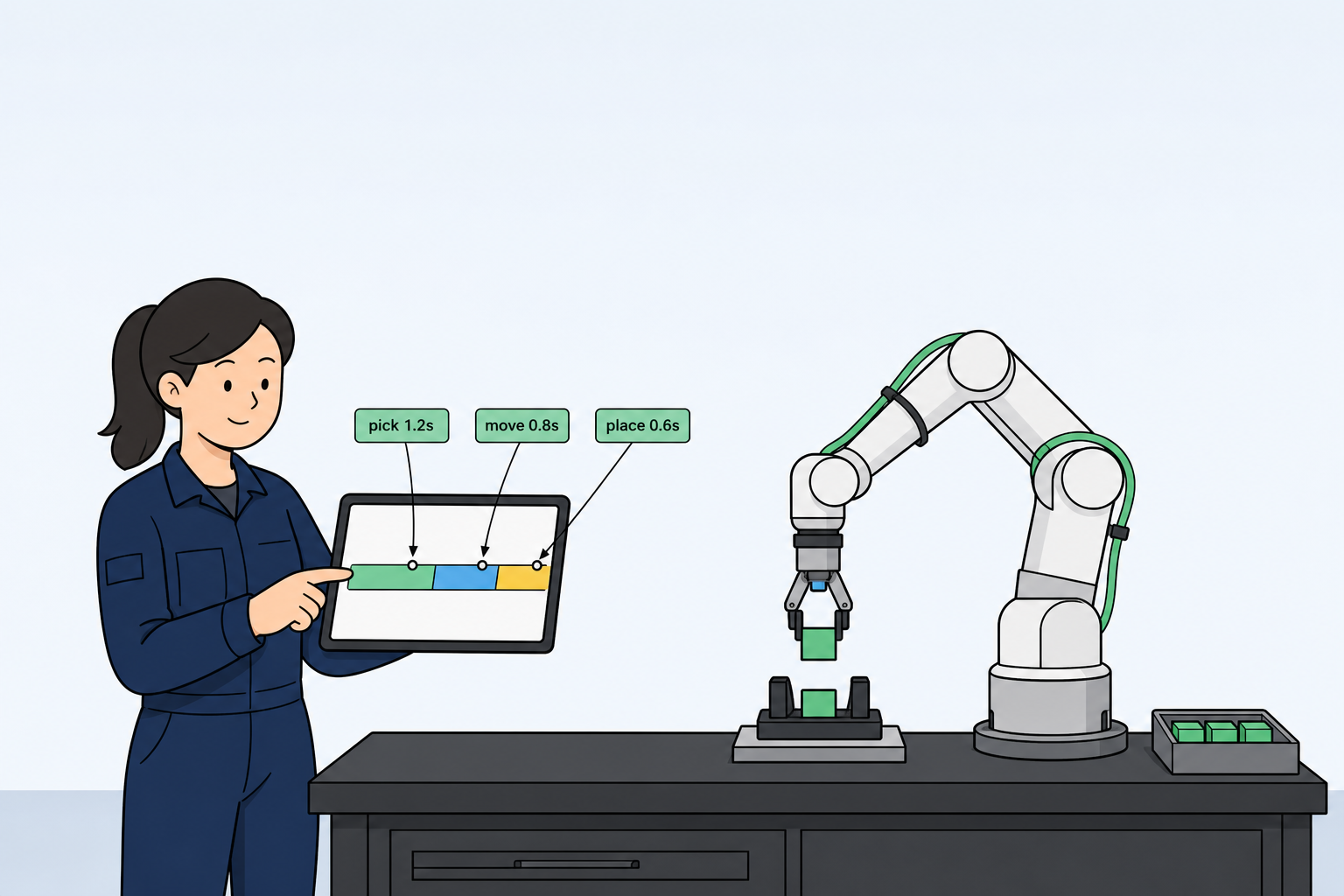
节拍要求(Cycle Time Requirements)
把单件循环拆成 取料 / 移动 / 放料 / 等待(以及换型、视觉、设备互锁),用秒表或录像估最坏工况,再与产线节拍对比——建议留 10–15% 余量。
合格信号: 估算节拍 ≤ 产线要求,且瓶颈不在「等上游设备」。 红灯信号: 只写「越快越好」;没有分段计时;忽略换型或首件偏移。
→ 节拍指南
环境约束(Environmental Constraints)
写清车间常态:粉尘、溅液、清洗、温湿度、高差、长动线、是否有人进入工作区。它们影响防护等级、速度策略与安全边界——不宜留到机械臂进场后再补。
合格信号: 环境要求与防护方案已写进项目范围;EHS 边界有草案。 红灯信号: 「协作就不用围栏」;清洗/食品场景未谈 IP 或冲洗方案。
集成复杂度(Integration Complexity)
列出夹爪/真空/视觉/传送带互锁需要多少 DI/DO、电压、谁接线、急停如何与产线联锁、PLC 或 MES 接口谁开发。集成越复杂,试点范围宜越小。
合格信号: 一页 I/O 草案已发给相关方;集成商、EHS、现场看同一份。 红灯信号: I/O 默认「都在机械臂里」;急停拓扑未对齐;三方各拿各的参数。
→ 选型误区指南 · 安全与 I/O 范围指南
推荐机器人档位(Recommended Robot Class)
前六项绿灯后,才把问题收敛到 r 系列哪一档:紧凑轻载(r-Lite)、日常主力(r-Core)、长臂跨工位(r-Reach)、重载码垛级(r-Max / r-Ultra)。档位不是「越大越好」——而是最坏工况下余量够用、占地与集成成本最合理的那一档。
合格信号: 采购、工程、现场共享同一条对比或顾问链接;档位与试点工位范围一致。 红灯信号: 用目录最大臂展凑数;首项目就想包整条线。
十五分钟:七项快审
| 核对项 | 合格 | 红灯 |
|---|---|---|
| 1 工件特性 | 最坏样件试抓或视觉方案已定 | 「到了现场再调」 |
| 2 负载 | TCP 含 EOAT,按额定校核 | 只报工件单重 |
| 3 臂展 | 关键姿态 + EOAT 已校核 | 只量中心距离 |
| 4 节拍 | 分段计时,留 10–15% 余量 | 无目标秒数 |
| 5 环境 | 防护与安全边界已对齐 | 协作 = 不用评估 |
| 6 集成 | I/O 与急停草案已共享 | I/O 默认含在臂里 |
| 7 机型档位 | 一条顾问/对比链接全员对齐 | 规格表各报各的 |
跑完一张 demo cycle
纸面全绿还不够。用样件在工位或等比例工装上跑 一圈最坏循环:掉料、保护停机、等上游——任何一项出现,回到对应章节补证据,再往下推进。