采购会上最常见的一幕:有人甩工业臂视频——节拍快、负载大;另一个人推协作臂——占地小、人能在旁边换料。两边都对,但说的往往不是同一条产线。
我们更实用的做法是:先承认这是两类不同的赌注,再用几个现场问题快速分流。
第一个问题:人要不要在同一工位里干活?
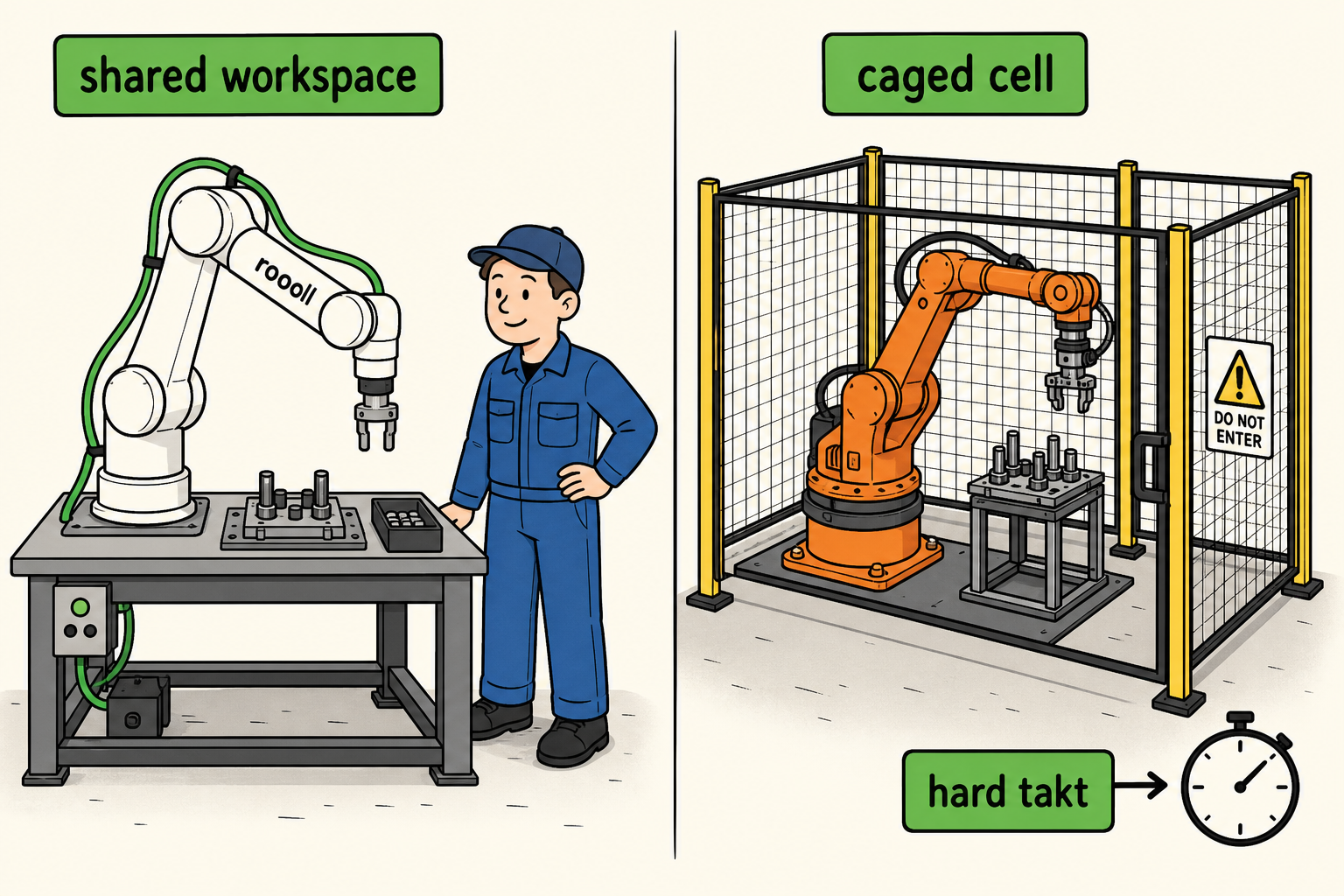
协作机械臂的设计前提,是人和臂共享工作区——换料、对位、抽检、处理异常,发生在臂旁边而不是围栏外。
传统工业臂的典型部署是隔离单元:围栏、光栅、联锁门。人进去之前,臂必须停或降到安全模式。节拍可以很快,但每次人工干预都要打断循环。
| 你的现场 | 更常走向 |
|---|---|
| 人要在旁边换料、补料、目检 | 协作臂 → 什么是协作机器人 |
| 人可以完全离开工位,24/7 无人值守 | 工业臂 + 围栏往往更匹配 |
| 「理论上人可以离开,旺季实际离不开」 | 按最坏班次选型,不按理想状态 |
协作不等于零安全责任。速度、工作区划界、急停与 I/O 仍要写进范围 → 安全与 I/O 指南
第二个问题:节拍有多狠?
Catalog 最大 TCP 速度,不等于你工位上的稳定节拍。但极限节拍仍是分流线之一:
协作臂:常见 sweet spot 是中等节拍、可重复取放——几秒到十几秒一圈,留人处理异常
工业臂:takt 压到 1–3 秒级、连续三班、几乎不允许等人时,专机化工业臂 + 硬自动化往往更有优势
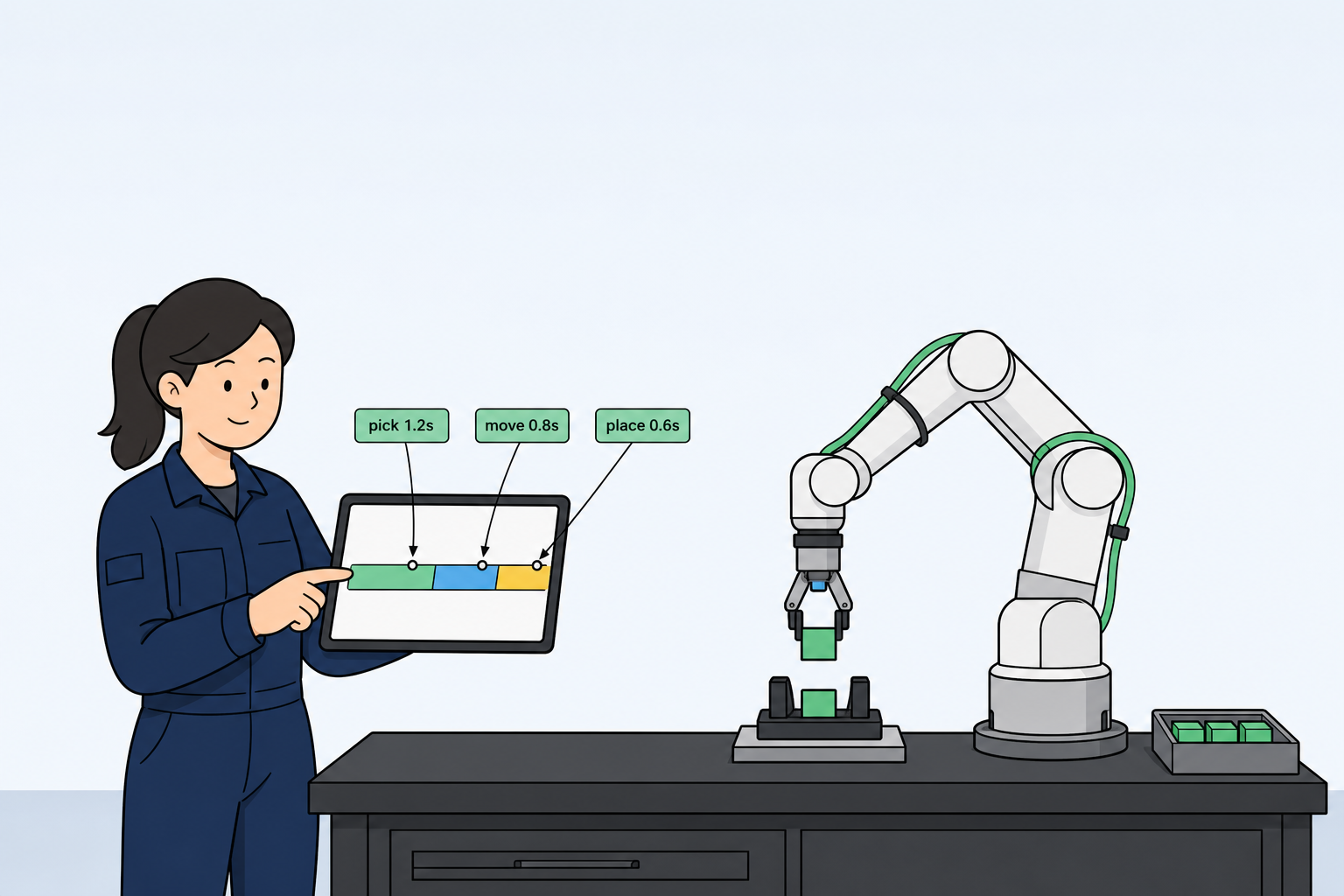
把 pick、move、place、夹爪开闭、真空、等待检测 逐项加总 再和产线需求比 → 节拍指南
如果瓶颈在「等 CNC 门开」或「等视觉 OK」,换更大臂也救不了——那是集成边界问题,不是臂型问题。
第三个问题:换型多不多?
SKU 多、批量小、经常改程序 → 协作单元改程序通常比改围栏 + 专机快
单一 SKU、十年不变、节拍要跑满 → 工业专机的一次性投入可能更划算
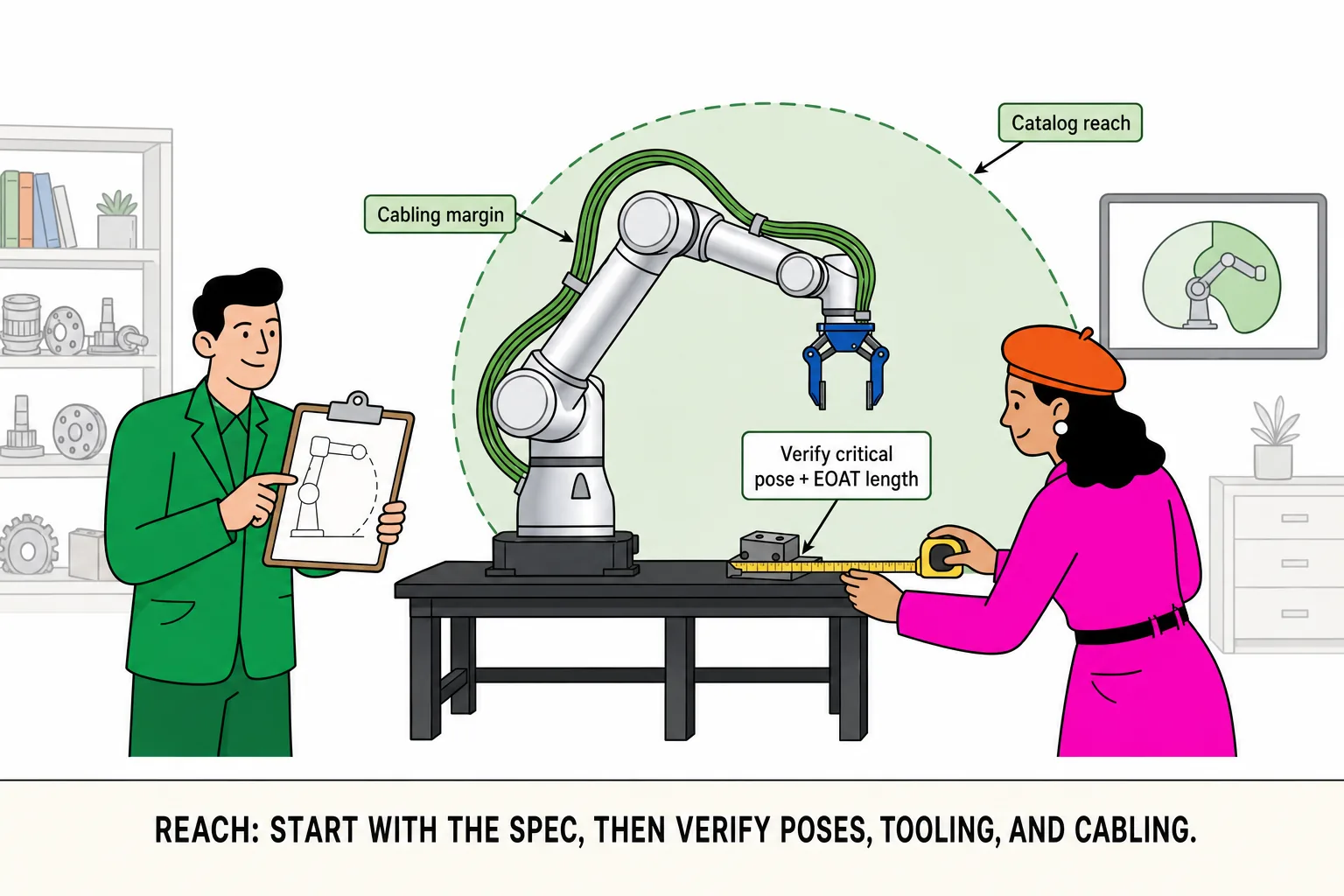
第四个问题:负载和臂展真实吗?
两边都要按 最坏 TCP 校核:工件 + 末端执行器 + 线缆,按额定不是峰值。
负载 → 负载指南
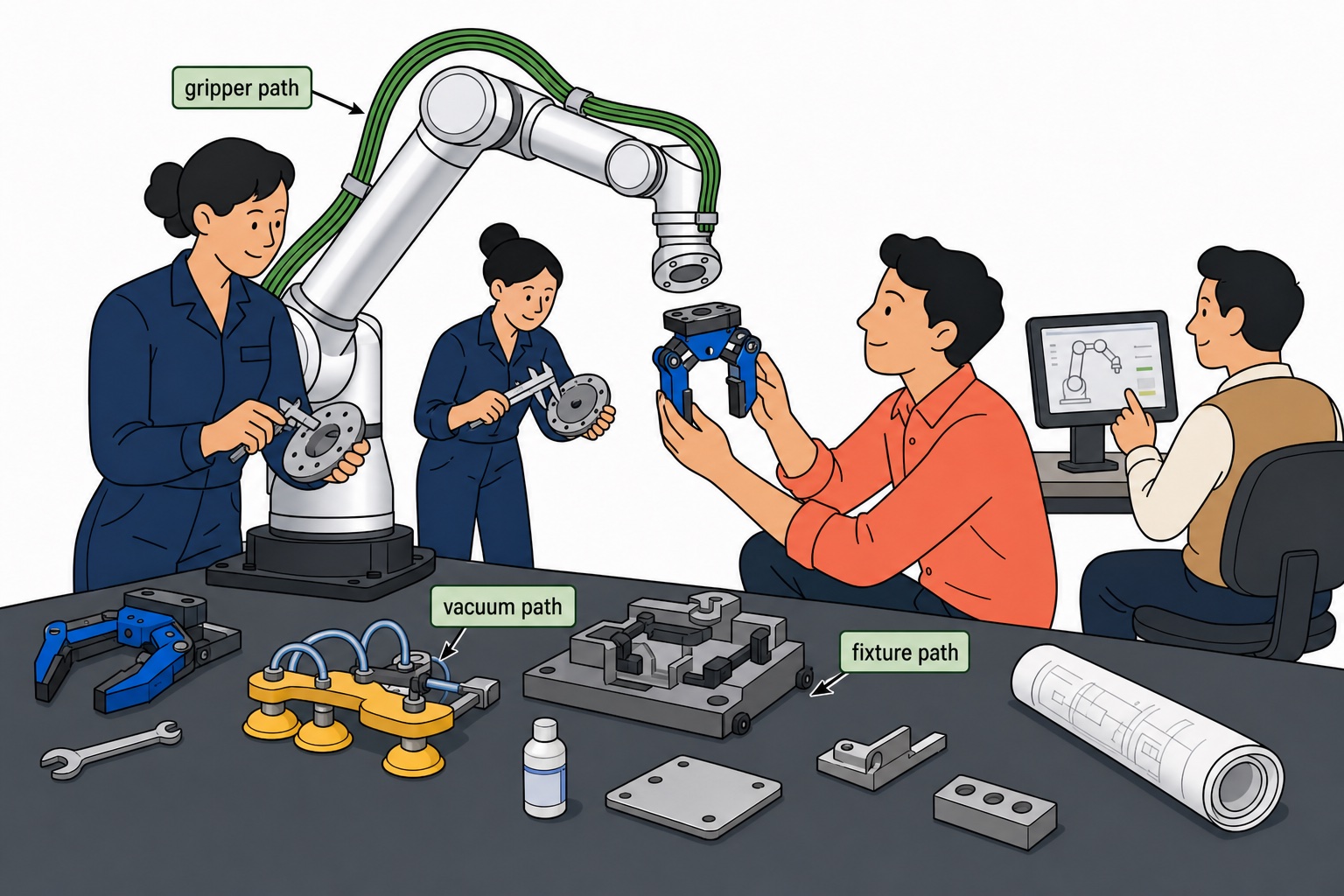
手还没定就定臂 → 末端执行器指南
快速分流
| 信号 | 更常先看 |
|---|---|
| 人要共站、换型多、试点想可逆 | 协作臂(r-Lite / r-Core / r-Reach 等) |
| 无人值守、极限节拍、重载连续运行 | 传统工业臂或专机 |
| 负载/臂展在协作额定边缘 | 横向对比选型 看 r-Max / r-Ultra |
| 任务本身还没想清楚 | 任务就绪评估 |
我们见过的一种误判:因为「工业臂看起来更专业」选了隔离单元,结果产线每天仍要人进工位换型三次——每次开门、复位、重跑,节拍优势被吃光。反过来也有:为了省围栏硬上协作臂,但 takt 要 4 秒一圈、人根本站不开——保护停机变成日常。